Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Gye Rae Tack
Jin Seung Choi
http://dx.doi.org/10.5103/KJSB.2017.27.1.53 Epub 2017 April 18
Abstract
Objective: The purpose of this study was to compare the accuracy of stride time and stride length provided by a commercial APDM inertial sensor system (APDM) with the results of three dimensional motion capture system (3D motion) during treadmill walking.
Method: Five healthy men participated in this experiment. All subjects walked on the treadmill for 3 minutes at their preferred walking speed. The 3D motion and the APDM were simultaneously used for extracting gait variables such as stride time and stride length. Mean difference and root mean squared (RMS) difference were used to compare the measured gait variables from the two measurement devices. The regression equation derived from the range of motion of the lower limb was also applied to correct the error of stride length.
Results: The stride time extracted from the APDM was almost the same as that from the 3D motion (the mean difference and RMS difference were less than 0.0001 sec and 0.0085 sec, respectively). For stride length, mean difference and RMS difference were less than 0.1141 m and 0.1254 m, respectively. However, after correction of the stride length error using the derived regression equation, the mean difference and the RMS difference decreased to 0.0134 m and 0.0556 m or less, respectively.
Conclusion: In this study, we confirmed the possibility of using the temporal variables provided from the APDM during treadmill walking. By applying the regression equation derived only from the range of motion provided by the APDM, the error of the spatial variable could be reduced. Although further studies are needed with additional subjects and various walking speeds, these results may provide the basic data necessary for using APDM in treadmill walking.
Keywords
Treadmill APDM inertial sensor system Stride time Stride length Regression equation
Typical gait analysis methods use motion analysis equipment based on optical image measurement techniques. The advantages of such equipment include enabling precise motion measurements and wide availability as commercial equipment, which makes it easy to synchronize with various measurement equipment and share measurement data. Moreover, it can also be used simultaneously with musculoskeletal modeling software. However, such equipment requires numerous ex- pensive infrared cameras and also present limitations in experimental space.
Treadmills are used extensively in gait studies owing to their ability to resolve the issue of limited experimental space and ease of adjusting to various experimental conditions, and recently, their utility has been highlighted even more through virtual reality content. However, com- pared to level walking, a typical treadmill has been reported to have the limitations of showing variability over a long time and inconsist- encies in biomechanical patterns and visual information (Alton, Baldey, Caplan, & Morrissey, 1998; Dingwell, Cusumano, Cavanagh, & Sternad, 2001; Dingwell & Cusumano, 2010; Lee & Hidler, 2008). Such changes should be identified and improved upon through comparisons with actual level walking.
More recently, inertial sensors have been widely used for measure- ment and analysis of human motion. Motion measurements based on inertial sensors are being used by many researchers owing to excellent portability and improved measurement accuracy, as shown by various studies. Accelerometers, gyroscopes, and magnetometers represent typical inertial sensors, and these may be used individually or together depending on the purpose of the measurement. Among the commer- cially available inertial sensor systems, MobilityLab from APDM is widely used in gait and balance studies. This system is comprised of 6 inertial sensor modules that include a 3-axial accelerometer, a 3-axial gyroscope, and a 3-axial magnetometer, and it provides measurement data from gait and balance assessment methods. From a gait study perspective, this system is very useful in that it provides reliable gait data during outdoor level walking (Mancini et al., 2011). However, this system was developed with the focus on level walking (Aminian, Najafi, Büla, Leyvraz, & Robert, 2002; Salarian, Burkhard, Vingerhoets, Jolles, & Aminian, 2013), and lacks testing on treadmill walking. Because of these reasons, a previous study that compared gait variability during 10 min of level and treadmill walking used an inertial sensor and a 3-dimensional (3D) motion capture system for outdoor level and treadmill walking, respectively (Choi, Kang, Bang, Kang, & Tack, 2011). Although the two experimental conditions both used reliable measurement methods, in general, it is necessary to perform an analysis with the same equipment when measuring and comparing the same variable. Recently, a study used an APDM inertial sensor system for treadmill walking (Hollman et al., 2016), but that study was not designed to verify the validity of the inertial sensor system during treadmill walking.
To summarize, it is necessary to use measurement equipment that can be used uniformly under diverse experimental conditions for con- ventional gait research, for which purpose inertial sensors are showing great potential. It is necessary to make direct comparisons with the same measurement system for both outdoor level walking and treadmill walking.
Accordingly, as a preliminary study on this topic, the present study conducted treadmill walking and compared the accuracy of gait vari- ables derived from a commercially available APDM inertial sensor system to the results obtained from using a 3D motion capture system and discusses its potential use.
1. Participants
The participants in the present study consisted of 5 male college students in their 20 s who had not experienced any lower leg mus- culoskeletal disorders in the past 2 yrs and were capable of normal walking. All participants took part in the study after receiving an explan- ation about the experiment and signing the consent form, and the study protocol received approval from the Institutional Review Board (IRB) of Konkuk University (7001355-201507-HR-066). The physical characteristics of the participants are shown in Table 1.
|
Subject |
Age |
Height |
Weight |
Leg length |
Preferred
walking |
|
S1 |
28 |
170 |
98 |
84.4 |
3.6 |
|
S2 |
27 |
176 |
73 |
91.9 |
3.5 |
|
S3 |
28 |
186 |
96 |
96 |
3.8 |
|
S4 |
23 |
175 |
67 |
90.5 |
3.0 |
|
S5 |
22 |
176 |
70 |
87.5 |
3.4 |
|
mean |
25.6 |
176.6 |
80.8 |
89.9 |
3.46 |
|
SD |
± 2.9 |
± 5.8 |
± 15.0 |
± 4.3 |
0.30 |
2. Measurements
All experiments were performed on the same treadmill (RX9200S, TOBEONE, Korea). All participants took part in 5 min of practice walking to be acclimated to the treadmill prior to the actual experiment, during which their preferred walking speed was determined. Each participant walked on the treadmill for 2 min at his preferred walking speed. The participants were instructed to look straight ahead and concentrate only on walking.
To derive the gait variables, the APDM inertial sensor system (APDM Inc., USA) and 3D motion capture system (Motion analysis Corp., USA) were used simultaneously. To derive the gait variables from the APDM inertial sensor system, 6 sensors were attached to different parts of the body (dorsal side of both wrists, the sternum close to the clavicular notch, the lower back in correspondence to L4/L5, and the frontal side of the shanks close to the malleoli) and the raw data from the sensors were collected with a sampling frequency of 128 Hz. The 3D motion capture system was comprised of 6 infrared cameras and round re- flective markers, 6 mm in diameter, were attached to the heel and toes as a Helen Hayes marker set. Data were acquired with a sampling fre- quency of 120 Hz.
3. Data processing
The stride time and stride length derived from the inertial sensor system were compared to the data from the 3D motion capture system. For the stride time and stride length from the APDM inertial sensor system, values calculated from MobilityLab software were used. To eliminate noise in the 3D motion capture system data, 3D motion data were processed using a 2nd order zero-lag Butterworth filter with a cut-off frequency of 7 Hz. To calculate the spatio-temporal gait variables, a foot velocity algorithm (FVA) method was used to detect the heel contact point (O'Connor, Thorpe, O'Malley, & Vaughan, 2007), and using the distance between consecutive heel contact points, stride time and stride length were calculated accordingly (Danion, Varraine, Bonnard, & Pailhous, 2003).
For comparison of gait variables, 50 strides from the middle part of 2 min of walking were extracted for each individual, which were com- pared for mean and RMS difference of APDM variables relative to the variables from the 3D motion capture system. Moreover, a linear re- gression equation was applied to correct the stride length values that showed large errors (Bland & Altman, 1999). Here, the stride length error was set as the dependent variable, while the height, length of both legs, and range of motion of shank (ROMshank) and knee (ROMknee) were input as the independent variables. Among these, ROMshank and ROMknee values were supplied from APDM. The calculations of the regression equation used a step wise method to select only the independent variables with a strong association. Matlab (Mathworks Inc., USA) was used to derive and calculate the gait variables, while the regression equation was derived using statistics software, SPSS Statics ver. 23 (IBM Corps, USA).
1. Accuracy
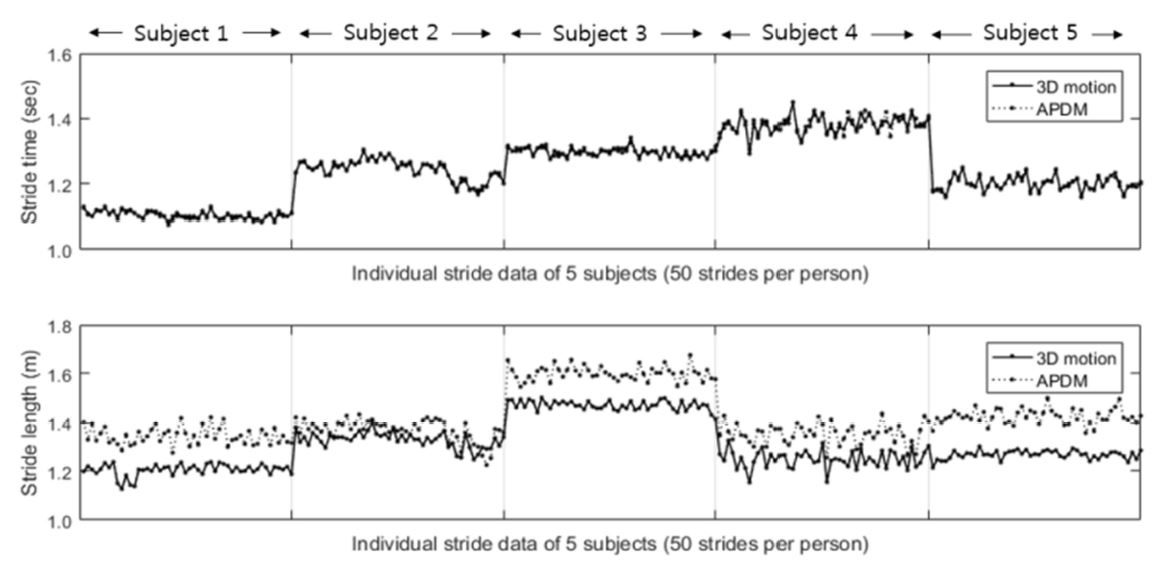
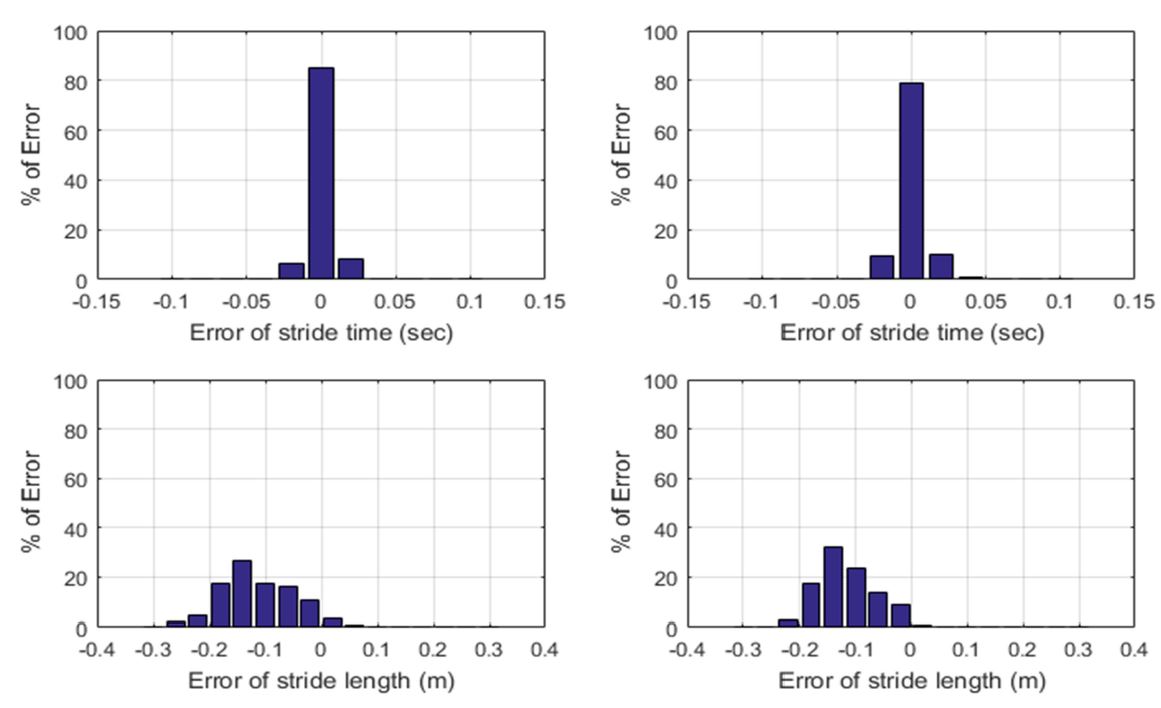
Figure 1 shows the stride time and stride length values of each individual acquired from the two types of equipment, while Figure 2 shows the size and distribution of each variable error. As shown in Figure 2 top, the stride time value acquired from APDM had a very small error value (mean difference = -0.0001 sec and 0.0000 sec, RMS difference = 0.0085 sec and 0.0079 sec for the right and left leg, respec- tively), and thus the values derived from the two methods were almost the same. However, the stride length error was relatively large (mean difference = -0.1141 m and 0.1134 m, RMS difference = 0.1254 m and 0.1312 m for the right and left leg, respectively), and the size was not consistent between individuals. Moreover, error bias also appeared (Figure 2 bottom). In other words, the stride length derived from APDM was overestimated.
2. Correction using regression equation
The results of deriving the regression equation by a stepwise method showed that the most accurate estimation was possible when only the constants and the right leg ROM shank value were used. The regression equation derived was as follows:
Estimated error of stride length = 0.384 - 0.007 × ROMshankR
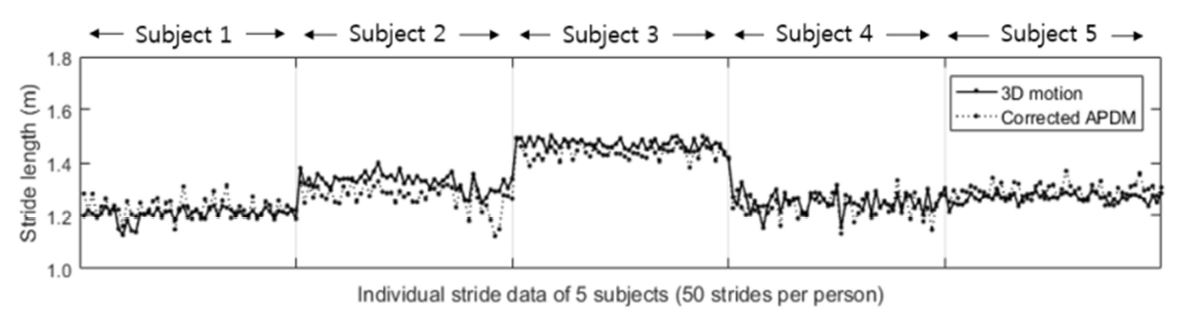
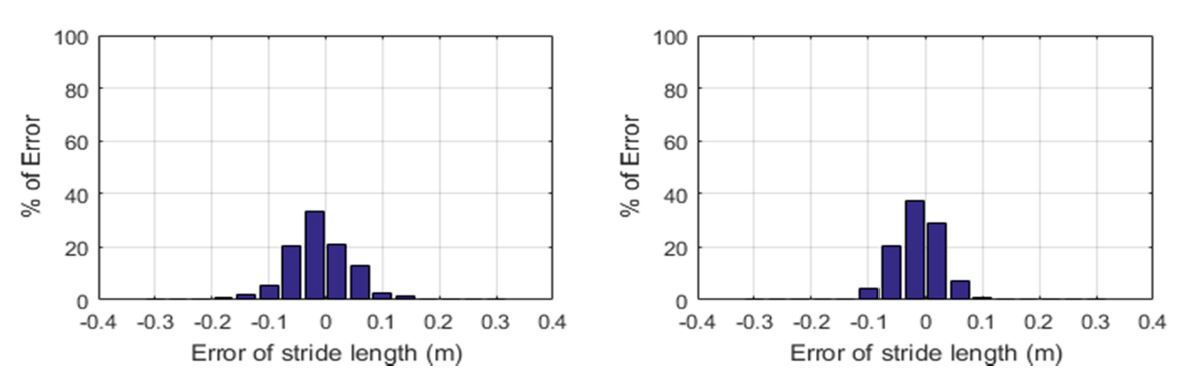
The estimated error of stride length derived using the regression equation was corrected by adding it to the stride length calculated by APDM. Figures 3 and 4 and Table 2 show improvements in stride length of APDM from applying the regression equation. In other words, the error size decreased to cause the bias of error distribution to decrease as well.
|
|
3D motion |
Original data |
After correction |
|||||
|
APDM |
Mean |
RMS |
Corrected |
Mean |
RMS |
|||
|
Stride time (sec) |
Right |
1.2450 ± 0.1044 |
1.2450 ± 0.1044 |
-0.0001 |
0.0085 |
- |
- |
- |
|
Left |
1.2451 ± 0.1042 |
1.2451 ± 0.1041 |
0.0000 |
0.0079 |
- |
- |
- |
|
|
Stride length (m) |
Right |
1.3025 ± 0.1000 |
1.4158 ± 0.1062 |
-0.1141 |
0.1254 |
1.3152 ± 0.0982 |
-0.0127 |
0.0556 |
|
Left |
1.3046 ± 0.1029 |
1.4187 ± 0.1069 |
-0.1134 |
0.1312 |
1.3181 ± 0.1012 |
-0.0134 |
0.0426 |
|
The objective of the present study was to measure the accuracy of spatio-temporal gait variables measured during treadmill walking by a commercially available APDM inertial sensor system and compare the findings with the results from a 3D motion capture system. We found that the stride time derived from APDM almost exactly matched the value derived from the 3D motion capture system, with a mean error of 0~0.0001 sec. Stride time data can be acquired by extracting the exact gait event data. Generally, the MobilityLab system from APDM attaches 6 sensors modules that include a 3-axial accelerometer, a 3-axial gyros- cope, and a 3-axial magnetometer to different body parts of the partici- pant. Among these sensors, the motions from the sensors attached to the legs are used to derive the spatio-temporal variables. Previous studies that established the basis for the algorithm used verified the accuracy of spatio-temporal gait variables during overground walking by using a 3D motion capture system and a force plate (Aminian et al., 2002; Salarian et al., 2013). In addition, based on the impact of the heel contact or the biomechanical motion characteristics of the gait according to the anatomical structure of the lower limb, the accuracy of the gait event detection, using the accelerometer and the gyro sensor, individually or simultaneously, is very good. (Choi, Kang, Mun, Bang, & Tack, 2009; Lau & Tong, 2008). It is thought that such an algorithm may be applied in the same manner for treadmill walking. In other words, the stride time calculation algorithm from APDM was derived based on overground walking, but this is not affected by treadmill walking.
In contrast, the stride length derived from APDM had a large mean error of ≥ 0.1 m with the existence of systematic biases (overall, the stride length was overestimated as shown in Figure 1 and Figure 2). In par- ticular, differences in these values existed between individuals (Figure 1), and as such, the values could not be corrected by adding or sub- tracting a certain value.
Generally, the method of deriving the spatial variable used in APDM is based on a double-pendulum model. In other words, it influences the calculation results of a pendulum or inverse pendulum model of the legs in swing and stance phases. For such methods, there is an algorithm that uses combinations of 2 to 4 inertial sensors (Aminian et al., 2002; Salarian et al., 2013), but the calculations are commonly made based on the measurements of inertia (acceleration or angular velocity) generated by leg movements. Unlike overground walking, treadmill walking involves backward movement caused by the treadmill belt of the supporting leg during the stance phase, which can affect the values measured by the sensors. In other words, because of the difference in gait patterns during overground and treadmill walking (especially the stance phase), differences may occur when compared with APDM results based on overground walking.
The present study conducted experiments and adjustments to utilize the spatial gait data from APDM during treadmill walking. The present study also applied a regression equation that was used in a previous study by Lanovaz, Oates, Treen, Unger, and Musselman (2017) for the purpose of applying the APDM algorithm that was developed based on the height of adults to children, 3 to 8 years old. When the derived regression equation was used for correction, the mean error of the APDM stride length, which was ≥ 0.1 m, decreased significantly to about 0.01 m. Moreover, this regression equation offers the advantages of being constructed using only the variables provided by APDM and a single regression equation being applied equally to all subjects.
The present study had some limitations. The regression equation derived in the present study cannot be generalized for clinical use be- cause only data from 5 participants were used to derive the equation. The present study confirmed that it was possible to use the temporal variables provided by APDM on treadmill walking, and also showed that spatial variable errors can be reduced by using the regression equation derived from using only the variables provided by APDM. Moreover, the findings in the present study were limited to results from the gait speed preferred by the participant. Therefore, additional studies are needed to examine the effects of various gait speeds and inclination angles.
The present study compared the accuracy of stride time and stride length during treadmill walking provided by a commercially available APDM inertial sensor system with the results from a 3D motion capture system. The results showed that the error of stride time extracted from APDM was very small, but there was an error involving overall over- estimation of stride length. However, that error could be corrected by a regression equation using ROM of the right shank provided by APDM. Therefore, stride time collected by an APDM inertial sensor system may be used directly in treadmill walking studies, and stride length may be used after correction.
References
1. Alton, F., Baldey, L., Caplan, S. & Morrissey, M. C. (1998). A kinematic comparison of overground and treadmill walking. Clinical Bio- mechanics, 13(6), 434-440.
Crossref
Google Scholar
PubMed
2. Aminian, K., Najafi, B., Büla, C., Leyvraz, P. F. & Robert, P. (2002). Spatio-temporal parameters of gait measured by an ambulatory system using miniature gyroscopes. Journal of Biomechanics, 35(5), 1036 -1043.
Crossref
Google Scholar
3. Bland, J. M. & Altman, D. G. (1999). Measuring agreement in method comparison studies. Statistical Methods in Medical Research, 8(2), 135-160.
Crossref
Google Scholar
4. Choi, J. S., Kang, D. W., Bang, Y. H., Kang, M. S. & Tack, G. R. (2011). Stride Time Variability on the Overground & Treadmill Walking in the healthy adults. Korean Journal of Sport Science, 22(1), 1701-1707.
Crossref
5. Choi, J. S., Kang, D. W., Mun, K. R., Bang, Y. H. & Tack, G. R. (2009). Devel- opment of gait event detection algorithm using an accelerometer. Korean Journal of Sport Biomechanics, 19(10), 159-166.
Crossref
Google Scholar
6. Danion, F., Varraine, E., Bonnard, M. & Pailhous, J. (2003). Stride vari- ability in human gait: the effect of stride frequency and stride length. Gait & Posture, 18(1), 69-77.
Crossref
Google Scholar
7. Dingwell, J. B., Cusumano, J. P., Cavanagh, P. R. & Sternad, D. (2001). Local dynamic stability versus kinematic variability of continuous over- ground and treadmill walking. Journal of Biomechanical Engineering, 123(1), 27-32.
Crossref
Google Scholar
8. Dingwell, J. B. & Cusumano, J. P. (2010). Re-interpreting detrended fluc- tuation analyses of stride-to-stride variability in human walking. Gait & Posture, 32(3), 348-353.
Crossref
Google Scholar
PubMed
9. Hollman, J. H., Watkins, M. K., Imhoff, A. C., Braun, C. E., Akervik, K. A. & Ness, D. K. (2016). A comparison of variability in spatiotemporal gait parameters between treadmill and overground walking con- ditions. Gait & Posture, 43, 204-209.
Crossref
Google Scholar
PubMed
10. Lanovaz, J. L., Oates, A. R., Treen, T. T., Unger, J. & Musselman, K. E. (2017). Validation of a commercial inertial sensor system for spatio- temporal gait measurements in children. Gait & Posture, 51, 14-19.
Google Scholar
11. Lau, H. & Tong, K. (2008). The reliability of using accelerometer and gyroscope for gait event identification on persons with dropped foot. Gait & Posture, 27(2), 248-257.
Google Scholar
PubMed
12. Lee, S. J. & Hidler, J. (2008). Biomechanics of overground vs. treadmill walking in healthy individuals. Journal of Applied Physiology, 104(3), 747-755.
Crossref
Google Scholar
PubMed
13. Mancini, M., King, L., Salarian, A., Holmstrom, L., McNames, J. & Horak, F. B. (2011). Mobility lab to assess balance and gait with syn- chronized body-worn sensors. Journal of Bioengineering & Bio- medical Science, 12, Suppl 1, 007.
Crossref
Google Scholar
PubMed
14. O'Connor, C. M., Thorpe, S. K., O'Malley, M. J. & Vaughan, C. L. (2007). Automatic detection of gait events using kinematic data. Gait & Posture, 25(3), 469-474.
Crossref
Google Scholar
PubMed
15. Salarian, A., Burkhard, P. R., Vingerhoets, F. J., Jolles, B. M. & Aminian, K. (2013). A novel approach to reducing number of sensing units for wearable gait analysis systems. IEEE Transactions on Biomedical Engineering, 60(1), 72-77.
Google Scholar
