Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Si-Hyun Yoo
Kuk-Hyun Jung
Ji-Seon Ryu
http://dx.doi.org/10.5103/KJSB.2016.26.1.5 Epub 2016 April 20
Abstract
The purpose of this study is to suggest new terminology for the ninety-five hand techniques based on the significance of their angular momentum, determined by analyzing each technique's influence or impact on the compartmentalized angular momentum of the trunk, upper arm, and forearm in the Taekwondo Poomsae.
An athlete who won the 2014 World Taekwondo Poomsae championship was selected and agreed to participate in the data collection phase of our investigation. The video data was collected using eight infrared cameras (Oqus 300, Qualysis, Sweden) and the Qualisys Track Manager software (Qualisys, Sweden). The angular momentum of each movement was then calculated using the Matlab R2009a software (The Mathworks, Inc., USA).
The classification of the ninety-five hand techniques in the Taekwondo Poomsae based on the significance of each segment's momentum is as follows. Makgi (blocking) is classified into fourteen categories, jireugi (punching) is classified into three categories, chigi (hitting) was classified into six categories, palgupchigi (elbow hitting) was classified into four categories, and jjireugi (thrusting) was classified two categories.
This study offers a new approach, based on a biomechanical method, to the classification of the hand techniques that reflect kinesthetic motions in the Taekwondo Poomsae.
Keywords
Taekwondo poomsae Angular momentum Hand techniques Classification Categories
The official Taekwondo poomsae ("forms") consist of 17 different poomsae and a total of 403 movements. There are 13 stances, 9 kicks, and 92 hand techniques (makgi: blocking; jireugi: punching, chigi: hitting, jjireugi: thrusting, etc.) (Yoo, 2015). Due to the diverse types and forms in use, hand techniques especially require consistent criteria for their classification and naming. In Taekwondo textbooks, terminology is based on the part of the body used, the target, and the method, as can be seen in the examples below (Kukkiwon, 2006).
"Body part used + target + method = terminology"
bakkatpalmok + arae + bakkatmakgi = araemakgi
bakkatpalmok + arae + geodeureomakgi = geodeureoaraemakgi
sonnal + arae + geodeureomakgi = sonnalaraemakgi
hansonnal + arae + bakkatmakgi = hansonnalaraemakgi
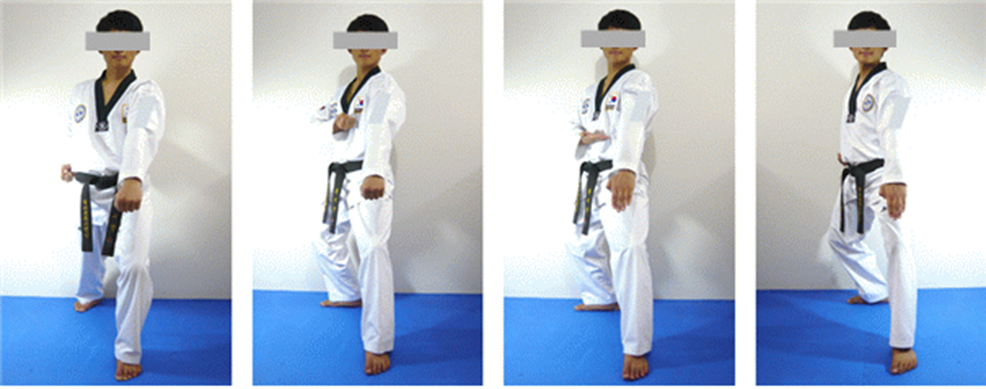
As shown above, Taekwondo hand techniques are de- scribed as different movements even when they share the same aim and a similar form (Figure 1). They are given different names due to variations in hand shape, or the part of the hand used to perform the technique (Sung, 2011). This causes confusion among athletes and instructors, which makes training inefficient. A lack of unification and consistency in Taekwondo terminology is causing commu- nication problems (Kang et al., 2008; Lee et al., 2009, 2010; Choi & Lim, 2013). In particular, with issues having been raised about the difficulty of techniques in the official poomsae, there is a need for improvements in the use of principles and systematic methods to compose Taekwondo movements (Kang, Kim, Lim, & Jung, 2005; Kim & Lee, 2002; Yoon, Cho, & Kim, 2001). However, the studies above only investigated and compared the frequency of techniques within each poomsae. Over a period of 2 years starting in 2008, Kang et al. (2008) and Lee et al. (2009) published a report to establish Taekwondo terminology as well as a dictionary of Taekwondo techniques, with the aim of re- classifying Taekwondo techniques and unifying the termi- nology. The dictionary of Taekwondo techniques used a system simpler than that of previous methods, establishing a classification that included all techniques in poomsae, gyeorugi (sparring), gyeokpa (breaking), and hoshinsul (self-defense). However, because the classification was based on the objective of the techniques (e.g., defense, attack) rather than the movements of the body, it fails to properly reflect the characteristics of techniques that aim to turn defense into attack, and it does not diverge greatly from previous classification systems that simply listed the techniques (Sung, 2011). Later, Sung (2011) attempted to reclassify techniques based on body structures and function, suggesting a systematic classification method that accounts for movements of the body by classifying techniques according to degrees of freedom in the joints of the upper arm. Unfortunately, because this classification was based on subjective assessment using an observational technique based on biomechanical principles, the approach was lacking in scientific evidence. Another limitation is that the classification did not account for some techniques that involve different movements of the trunk segments but the same movements of the upper arm segments, such as 'momtongbakkatmakgi' and 'momtongbiteureomakgi'. Meanwhile, Choi & Lim (2013) attempted a reclassification of Taekwondo techniques according to 'variability between movements', 'stability of the environment/motor state', 'object manipulation', and 'physical movement', based on Gentile's theory of motor learning. This classification method played a positive role in determining the characteristics of each technique, but it was unable to reveal the principles of the techniques or account for movements of the body (Yoo, 2015).
Hence, there have been persistent efforts to improve upon problems in classifying and assigning terminilogy to hand techniques in Taekwondo, principles for composing movements, and systems of techniques. Nevertheless, no systematic classification and description method based on scientific evidence exists as yet. In order to maintain the status of Taekwondo as a global sport with 206 partici- pating countries as well as to establish a logical system of Taekwondo techniques that is in step with the globalization of Taekwondo, it is essential to classify the official Tae- kwondo poomsae based on biomechanical evidence.
Unlike kicks, the hand techniques in Taekwondo show forms with diverse, complex rotational movements of not only the trunk segments, but also the arm segments. Thus, while classifying Taekwondo hand techniques, it would be ideal to consider local momentum (the rotational move- ment of the arm segments themselves), remote momentum (rotational movement relative to the body's center), and angular momentum, since the objective of hand techniques is to create a large impact (Korean Society of Sport Bio- mechanics [KSSB], 2015; Hamill & Ryu, 2003). Moreover, appropriate names need to be proposed for the types of hand techniques, once they have been classified.
Therefore, this study aimed to classify hand techniques in the official Taekwondo poomsae according to the angular momentum of each segment, and to propose names for the different types of hand techniques in the classification.
1. Subjects
The subject for this study was the winner at the 2014 World Taekwondo Poomsae Championships (age: 21 years; height: 169 cm; weight 67 kg; experience: 9 years). Before participating in the experiment, the subject was given a thorough explanation of the study's objectives and the experimental procedure, and completed the consent form.
2. Experimental procedure
This study used 8 infrared cameras (Oqus 300, Qualysis, Sweden) to acquire images of hand techniques in the official Taekwondo poomsae, at a sampling rate of 200 Hz. The subject warmed up for approximately 30 min in the laboratory, following which 20 reflective markers were attached to the medial and lateral sides of the subject's arm joints (left & right acromion, left & right iliac crest, left & right humerus medial epicondyle, left & right humerus lateral epicondyle, left & right radius styloid process, left & right ulnar styloid process) and segment surfaces (7th cervical vertebra, sternum manubrium, left & right rib, left & right upper arm, left & right forearm). After first taking an image in a static, anatomical position, the subject per- formed Taekwondo hand techniques, and movements of the left arm were analyzed.
3. Analysis interval
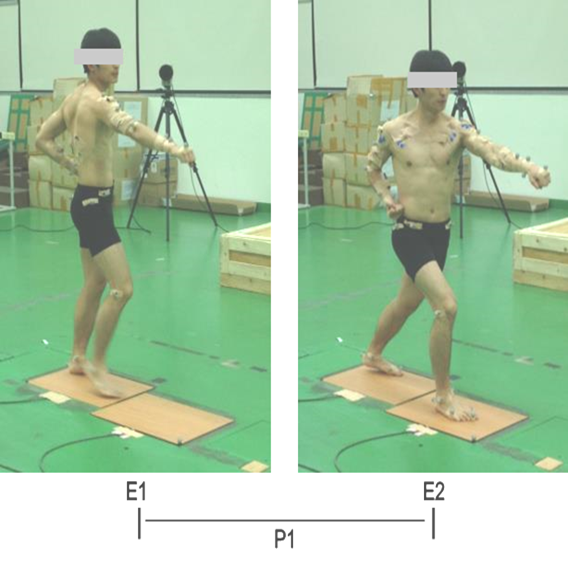
In order to efficiently analyze the Taekwondo hand tech- niques in this study, the actual interval in which the move- ment took place was analyzed from the moment the fingertips accelerated in the direction of the technique (E1) until the moment the fingertips stopped (E2) (Figure 3).
4. Data analysis
Qualisys Track Manager software (Qualisys, Sweden) and Matlab R2009a software (The MathWorks, Inc., USA) were used to analyze the hand techniques. Three-dimensional spatial coordinates were determined using the nonlinear transformation (NLT) method (Ryu, 2009). The coordinate system was set as shown in Figure 2. Data was passed through a Butterworth 2nd order low-pass filter with a cut¬off frequency of 12 Hz. Here, of the 92 hand techniques used in the official Taekwondo poomsae, the 11 move- ments in which the two arms perform different objectives (defense or attack) were treated as two different techniques. 3 warm-up movements were excluded from the analysis, as well as 5 other movements that involve movement of the opposite arm (pulling alongside the iliac crest or per- forming a supplementary role) or are performed slowly while tensing the muscles, meaning that a total of 95 tech- niques were included in the analysis. Based on the Tae- kwondo hand technique classification criteria (Kukkiwon, 2006), this study classified techniques broadly within the categories of makgi (blocking), jireugi (punching), chigi (hitting), palgupchigi (elbow hitting), and jjireugi (thrusting). Since palgupchigi is performed using the elbow, only the results for the trunk and upper arm were used for these techniques.

5. Variables of interest
Three-dimensional angular momentum was calculated using the dynamic methods suggested by Hamill & Ryu (2003) and Winter (2009). Here, the moment of inertia was calculated using the method suggested by Challis (1996).
1) Segment angle
In order to produce regional coordinates for each segment, unit vectors from the center of the distal joint were determined before performing the movement by using the medial and lateral coordinates for the joints obtained in a static anatomical position and the coordinates of the segment movement markers. Then, by calculating the vector from the marker attached to the segment sur- face to the center of the segment, the unit vector from the center of the segment was determined. Here, the unit vector was calculated using the cross product according to the right-hand rule. The product of the calibration unit vector (CUV) calculated for each segment in the static, anatomical position, and the tracking unit vector (TUV) calculated at each moment during performance of a given movement, forms a 3 × 3 matrix, as shown below. This was used to calculate the three-dimensional segment angle. Here, rotation around the X-axis indicates flexion/extension, rotation around the Y-axis indicates abduction/adduction, and rotation around the Z-axis indicates medial/lateral rotation. The direction of rotation was defined such that anti-clockwise is positive (+) and clockwise is negative (-) (Table 1).
2) Segment angular velocity
A segment's angular velocity refers to the velocity of rotational movement for that segment, and it is directly related to movement. Here, since the axes change over time in accordance with the three-dimensional segment angle, a simple integral over time cannot be used to cal- culate the segment's angular velocity. Therefore, in order to calculate the three-dimensional angular velocity for the segment, the coordinate system was deformed based on an orthogonal coordinate system, according to the following equations (Hamill & Ryu, 2003; Winter, 2009):
|
Segment |
X axis |
|
Y axis |
|
Z axis |
||||
|
(+) |
(-) |
(+) |
(-) |
(+) |
(-) |
||||
|
Trunk |
Extension |
Flexion |
|
Right |
Left |
|
Left |
Right |
|
|
Upper |
Flexion |
Extension |
|
Abduction |
Adduction |
|
External rotation |
Internal |
|
|
Fore arm |
Flexion |
Extension |
|
- |
- |
|
Supination |
Pronation |
|
ω_x=ϕ ̇sinθsinψ+θ ̇cosψ,
ω_y=ϕ ̇sinθcosψ+θ ̇sinψ,
ω_z=ϕ ̇cosθ+ψ ̇,
where ω_x,ω_y,ω_z= segment angular velocity for each direction,
ϕ= segment angle around the X-axis,
θ= segment angle around the Y-axis,
ψ= segment angle around the Z-axis.
3) Moment of inertia
Moment of inertia is a measure of inertia of angular momentum, and therefore signifies the rotational resistance. It is determined by the mass, length, and radius of each segment, and is directly related to rotational force. Moment of inertia was calculated using the method suggested by Challis (1996).
I_L=1/2 〖mr〗^2, I_T=1/12 m(L^2+〖3r〗^2),
where, I_L= longitudinal moment of inertia, L_T= transverse moment of inertia, m= segment mass, r= segment radius, L= segment length.
4) Angular momentum
Angular momentum is a quantitative measure of the amount of rotational movement due to the effect of a rotational force. The angular momentum when performing Taekwondo hand techniques is calculated as the sum of the local angular momentum of the segment itself and the global angular momentum of the segment relative to the center of the body (Hamill & Ryu, 2003).
where H= angular momentum,I= segment moment of inertia, ω= segment angular velocity, m= segment mass ratio, r= relative position, by subtracting the position vector of the center of the body from the position vector of the center of the segment, v= relative velocity, by subtracting the velocity vector for the center of the body from the velocity vector of the segment.
6. Classification of Taekwondo hand techniques according to the angular momentum of each segment
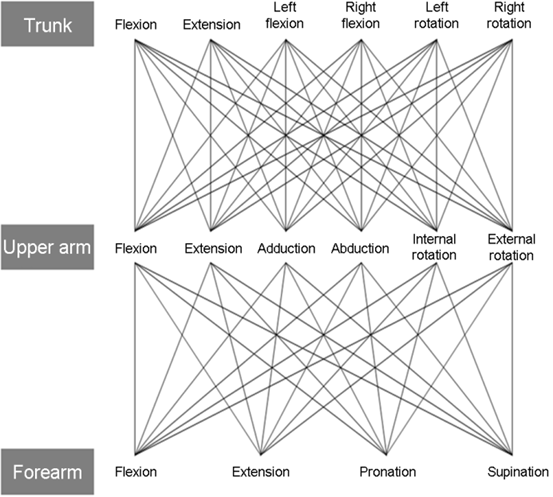
After arranging the angular momenta for each segment according to the direction of movement, the movement in the direction with the largest angular momentum was classified as the representative movement for that segment. For example, when performing momtongbandaejireugi, given angular momenta of 476.90 kgm2/s for extension of the trunk, 33.30 kgm2/s for flexion of the trunk, 66.31 kgm2/s for right flexion, 27.59 kgm2/s for left flexion, 17.15 kgm2/s for left rotation, and 205.35 kgm2/s for right rotation, the representative movement making the largest contribution to momtongbandaejireugi would be extension. By calculating angular momenta using the above method for the upper arm and forearm segments, momtongband- aejireugi is classified as a form involving extension of the trunk, flexion of the upper arm, and extension of the forearm. Here, the hand segment does not have a large impact on the expression and description of hand tech- niques in Taekwondo, it moves in the same direction as the forearm, and only changes shape according to the part of the body used. Therefore, it was excluded from the classification process. According to the analysis of three-dimensional angular momentum for the truck, upper arm, and forearm, 95 Taekwondo hand techniques were classified according to the analysis of three-dimensional angular momentum for the trunk, upper arm, and forearm. As shown in Figure 4, a maximum of 144 different forms can be expressed by this system.
7. Proposing names for hand techniques based on their form
First, a primary classification of Taekwondo hand tech- niques was prepared according to their purpose (Kukkiwon, 2006), with the categories being makgi (blocking), jireugi (punching), chigi (hitting), palgupchigi (elbow hitting), and jjireugi (thrusting). Within those categories, forms were classified by the representative movements of the segments, as determined by angular velocity. The unified names pro- posed by these forms were displayed in the secondary classification. Finally, in the tertiary classification, the existing hand technique names were displayed. Here, 3 professionals with at least 10 years of experience teaching Taekwondo reached a consensus on the names through at least 3 rounds of discussion.
This study developed a system to classify Taekwondo hand techniques, and proposed names related to their form, by analyzing the angular momentum of the trunk, upper arm, and forearm in each direction when 95 hand tech- niques were performed. To this end, the angular moment for each segment was calculated, and the peak, minimum, and total values have been presented. The classification was based on the total angular momenta. The results were as follows.
1. Segment angular momentum
1) Trunk segment
|
Axis |
Direction |
Frequency |
Peak
angular momentum (kgm2/s) |
Total
angular momentum (kgm2/s) |
|
X |
Extension (+) |
76 (80.00) |
10.83 |
483.26 |
|
Flexion (-) |
15 (15.79) |
-4.68 |
-275.72 |
|
|
Y |
Right flexion (+) |
0 (0.00) |
- |
- |
|
Left flexion (-) |
0 (0.00) |
- |
- |
|
|
Z |
Left rotation (+) |
4 (4.21) |
10.04 |
282.42 |
|
Right rotation (-) |
0 (0.00) |
- |
- |
For each direction of trunk angular momentum, Table 2 displays the frequency of hand techniques for which that direction had the largest angular momentum, as well as the mean values for the peak and total angular momentum. Extension of the trunk showed the highest frequency of hand techniques (76 techniques; 80.00%) for which it had the largest angular momentum, and showed a peak angular momentum of 10.83 kgm2/s, and a total angular momen- tum of 483.26 kgm2/s. Meanwhile, 15 techniques (15.79%) showed the largest angular momentum for flexion, which had a peak angular momentum of -4.68 kgm2/s, and a total angular momentum of -275.72 kgm2/s. Left rotation had a frequency of 4 techniques (4.21%), a peak angular momentum of 10.04 kgm2/s, and a total angular momen-tum of 282.42 kgm2/s. However, there were no techniques for which the largest angular momentum was in right flexion, left flexion, or right rotation.
2) Upper arm segment
|
Axis |
Direction |
Frequency |
Peak angular momentum (kgm2/s) |
Total angular momentum (kgm2/s) |
|
X |
Flexion (+) |
53 (55.79) |
1.19 |
61.05 |
|
Extension (-) |
2 (2.11) |
-0.84 |
-21.28 |
|
|
Y |
Abduction (+) |
25 (26.32) |
0.16 |
45.66 |
|
Adduction (-) |
4 (4.21) |
-0.20 |
-55.46 |
|
|
Z |
External rotation (+) |
3 (3.16) |
0.92 |
53.31 |
|
Internal rotation (-) |
8 (8.42) |
-1.49 |
-60.06 |
For each direction of upper arm angular momentum, Table 3 displays the frequency of hand techniques for which that direction had the largest angular momentum, as well as the mean values for the peak and total angular momentum. Flexion of the upper arm showed the highest frequency of hand techniques (53 techniques; 55.79%) for which it had the largest angular momentum, and showed a peak angular momentum of 1.19 kgm2/s, and a total angular momentum of 61.05 kgm2/s. Meanwhile, there were 2 hand techniques (2.11%) with the largest angular momentum for extension of the upper arm, for which the peak angular momentum was -0.84 kgm2/s, and the total angular momentum was -21.28 kgm2/s. For abduction, the frequency was 25 techniques (26.32%), the peak angular momentum was 0.16 kgm2/s, and the total angular momen- tum was 45.66 kgm2/s. For adduction, the frequency was 4 techniques (4.21%), the peak angular momentum was -0.20 kgm2/s, and the total angular momentum was 55.46 kgm2/s. For external rotation, the frequency was 3 tech-niques (3.16%), the peak angular momentum was 0.92 kgm2/s, and the total angular momentum was 53.31 kgm2/s. For internal rotation, the frequency was 8 techniques (8.42%), the peak angular momentum was -1.49 kgm2/s, and the total angular momentum was -60.06 kgm2/s.
3) Forearm segment
| Axis | Direction | Frequency(%) | Peak angular momentum (kgm2/s) | Total angular momentum (kgm2/s) |
| X | Flexion (+) | 2 (2.11) | 0.74 | 45.83 |
| Extension (-) | 67 (70.53) | -0.45/td> | -76.79 | |
| Z | Supination (+) | 11 (11.58) | 1.25 | 55.38 |
| Pronation (-) | 15 (15.79) | -1.69 | -55.09 |
For each direction of forearm angular momentum, Table 4 displays the frequency of hand techniques for which that direction had the largest angular momentum, as well as the mean values for the peak and total angular momentum. Extension of the forearm had the highest frequency of hand techniques (67 techniques; 70.53%) for which it had the largest angular momentum, a peak angular momentum of -0.45 kgm2/s, and a total angular momentum of -76.79 kgm2/s. Meanwhile, 2 techniques (2.11%) showed the largest angular momentum for flexion of the forearm, which had a peak angular momentum of 0.74 kgm2/s, and a total angular momentum of 45.83 kgm2/s. Supination showed a frequency of 11 techniques (11.58%), a peak angular momentum of 1.25 kgm2/s, and a total angular momentum of 55.38 kgm2/s. Pronation showed a frequency of 15 techniques (15.79%), a peak angular momentum of -1.69 kgm2/s, and a total angular momentum of -55.09 kgm2/s.
2. Classification of hand techniques by the angular momentum of each segment
First, a primary classification of the Taekwondo hand techniques into makgi (blocking), jireugi (punching), chigi (hitting), and jjireugi (thrusting) was prepared based on the suggestions provided by Taekwondo textbooks (Kukkiwon, 2006). Next, the hand techniques were classified according to the directions of movements in each segment that showed the largest angular momentum. The 5 palgupchigi (elbow hitting) techniques were classified based only on the movements of the trunk and upper arm segments.
1) Classification of makgi techniques
Makgi techniques constitute 58 (61.1%) of the 95 Tae-kwondo hand techniques. Table 5 shows the results of classifying the Taekwondo makgi techniques according to the angular momentum of each segment. Since the 12 special makgi techniques in the official poomsae have the same objective as the makgi techniques, these were in-cluded in the makgi classification. Of the 144 total possible forms, makgi techniques showed broadly 14 forms.
First, the most frequent form was the combination of trunk extension, upper arm flexion, and forearm extension, accounting for 24 makgi techniques, which were jebipum- mokchigi (hansonnaleolgulmakgi), eolgulmakgi, sonnal-momtongmakgi, momtongkeodeureobakkatmakgi, oesan- teulmakgi (anpalmokeolgulyeopmakgi), geumgangmakgi (eolgulmakgi), santeulmakgi (eolgulanmakgi), santeulmakgi (anpalmokeolgulyeopmakgi), geumgangmomtongmakgi (eolgulmakgi), anpalmokeolgulgeodeureoyeopmakgi, hwang- somakgi, sonbadakmomtonggeodeureobakkatmakgi, sonnaldeungmomtongmakgi, hansonnaleolgulmakgi, geum- gangapjireugi (eolgulmakgi), momtonggeodeureoanmakgi, geumgangmakgi (araeyeopmakgi), oesanteulmakgi (ara- eyeopmakgi), sonnalgeumgangmakgi (hansonnalaraeyeop- makgi), anpalmokmomtonggeodeureobakkatmakgi, geum- gangyeopjireugi (eolgulmakgi), sonnaloesanteulmakgi (hansonnalaraeyeopmakgi), sonnaloesanteulmakgi (son-naldeungeolgulyeopmakgi), and sonnalgeumgangmakgi (hansonnaleolgulmakgi). The second most frequent form was trunk extension, upper arm abduction, and forearm extension, accounting for 11 makgi techniques, which were momtongbakkatmakgi, hansonnalmomtongbakkatmakgi, hansonnaleolgulbiteureomakgi, eolgulbakkatmakgi, gawi-makgi (anpalmokmomtongbakkatmakgi), hansonnalmom- tongyeopmakgi, geumgangmomtongmakgi (anpalmok-momtongbakkatmakgi), hechyeosanteulmakgi, anpalmok-momtongbakkatmakgi, hansonnalmomtongbiteureomakgi, and anpalmokmomtongbiteureomakgi. The next most fre- quent form was trunk extension, upper arm flexion, and forearm supination, for the techniques momtonganmakgi, momtongmakgi, and hansonnalmomtongmakgi. Trunk ex- tension, upper arm flexion, and forearm pronation was the form used for momtonghechyeomakgi. Trunk extension, upper arm abduction, and forearm supination was the form used for anpalmokmomtonghechyeomakgi and sonnal-deungmomtonghechyeomakgi. Trunk extension, upper arm adduction, and forearm extension was the form used for batangsonnulleomakgi. Trunk extension, upper arm internal rotation, and forearm extension was the form used for gawimakgi (araemakgi). Trunk extension, upper arm internal rotation, and forearm pronation was the form used for batangsonmomtongmakgi, batangsonmomtonganmakgi, and batangsonmomtonggeodeureoanmakgi. Trunk flexion, upper arm flexion, and forearm extension was the form used for araegeodeureomakgi, eotgeoreo-eolgulmakgi, and sonnalaraemakgi. Trunk flexion, upper arm abduction, and forearm flexion was the form used for kkeureo-olligi. Trunk flexion, upper arm abduction, and forearm pronation was the form used for araemakgi, hansonnalaraemakgi, and araeyeopmakgi. Trunk flexion, upper arm adduction, and forearm flexion was the form used for araepyojeokmakgi. Trunk flexion, upper arm internal rotation, and forearm pronation was the form used for eotgeoreoaraemakgi and sonnaleotgeoreoaraemakgi. Finally, trunk left rotation, upper arm extension, and forearm pronation was the form used for araehechyeomakgi and sonnalaraehechyeomakgi.
|
Trunk |
Upper arm |
Forearm |
Frequency |
% |
|
|
Extension |
Flexion |
Extension |
24 |
25.3 |
|
|
Extension |
Flexion |
Supination |
3 |
3.16 |
|
|
Extension |
Flexion |
Pronation |
1 |
1.05 |
|
|
Extension |
Abduction |
Extension |
11 |
11.6 |
|
|
Extension |
Abduction |
Supination |
2 |
2.11 |
|
|
Extension |
Adduction |
Extension |
1 |
1.05 |
|
|
Extension |
Internal rotation |
Extension |
1 |
1.05 |
|
|
Extension |
Internal rotation |
Pronation |
3 |
3.16 |
|
|
Flexion |
Flexion |
Extension |
3 |
3.16 |
|
|
Flexion |
Abduction |
Flexion |
1 |
1.05 |
|
|
Flexion |
Abduction |
Pronation |
3 |
3.16 |
|
|
Flexion |
Adduction |
Flexion |
1 |
1.05 |
|
|
Flexion |
Internal |
Pronation |
2 |
2.11 |
|
|
Left rotation |
Extension |
Pronation |
2 |
2.11 |
|
2) Classification of jireugi techniques
Jireugi techniques account for 12 of the 95 Taekwondo hand techniques. Table 6 shows the classification of Tae-kwondo jireugi techniques according to the angular mo- mentum of each segment. Here, although keundoljjeogwi is a special technique, it was included in the classification for jireugi techniques because it has the same objective as dollyeojireugi in the official poomsae. Of the 144 possible forms, 3 were used in jireugi techniques.
The most frequent form for jireugi techniques was trunk extension, upper arm flexion, and forearm extension, which was used for the following 10 techniques: momtong- bandaejireugi, momtongbarojireugi, eolgulbandaejireugi, dujumeokjeochyeojireugi, momtongyeopjireugi, danggyeo- teokjireugi, chetdarijireugi (momtongbarojireugi), geum-gangapjireugi (momtongbandaejireugi), pyojeokjireugi, and geumgangyeopjireugi (momtongyeopjireugi). Following this, trunk extension, upper arm external rotation, and forearm supination was used for soseumjireugi, while trunk left rotation, upper arm external rotation, and forearm pro-nation was used for keundoljjeogwi.
|
Trunk |
Upper arm |
Forearm |
Frequency |
% |
|
Extension |
Flexion |
Extension |
10 |
10.5 |
|
Extension |
External rotation |
Supination |
1 |
1.05 |
|
Left rotation |
External rotation |
Pronation |
1 |
1.05 |
3) Classification of chigi techniques
Chigi techniques account for 17 of the 95 Taekwondo hand techniques. Table 7 shows the results of classifying chigi techniques according to the angular momentum for each segment. Of the 144 theoretically possible forms, the chigi techniques could be classified broadly using 6 forms.
The most frequent form for chigi techniques was trunk extension, upper arm flexion, and forearm extension, which was used in the following 7 techniques: hansonnalmokchigi, jebipummokchigi (hansonnalmokchigi), kaljaebi, mureupk- keokkgi, batangsonteokchigi, mejumeokpyojeokchigi, and geodeureokaljaebi. This was followed by trunk flexion, upper arm abduction, and forearm extension, which was used for the following 5 chigi techniques: mejumeokbak-katchigi, deungjumeokbakkatchigi, hansonnalbakkatchigi, deungjumeokeolgulgeodeureochigi, and hansonnalyeop-chigi. Trunk extension, upper arm abduction, and forearm extension was used for deungjumeokapchigi and chetd-arijireugi (mejumeokbakkatchigi). Trunk extension, upper arm adduction, and forearm extension was used for deung- jumeokdanggyeoteokchigi. Trunk extension, upper arm internal rotation, and forearm extension was used for mejumeoknaeryeochigi. Finally, trunk extension, upper arm internal rotation, and forearm supination was used for dumejumeokyeopgurichigi.
|
Trunk |
Upper arm |
Forearm |
Frequency |
% |
|
Extension |
Flexion |
Extension |
7 |
7.37 |
|
Extension |
Abduction |
Extension |
2 |
2.11 |
|
Extension |
Adduction |
Extension |
1 |
1.05 |
|
Extension |
Internal |
Extension |
1 |
1.05 |
|
Extension |
Interna |
Supination |
1 |
1.05 |
|
Flexion |
Abduction |
Extension |
5 |
5.26 |
4) Classification of palgupchigi techniques
Palgupchigi techniques account for 5 of the 95 Tae-kwondo hand techniques. Table 8 shows the results of classifying palgupchigi techniques according to the angular momentum for each segment. Forearm movements were excluded for the palgupchigi techniques, and they were classified according to trunk and upper arm movements alone. Of the 144 possible forms, palgupchigi techniques were broadly classified using 4 forms.
The most common form was trunk extension and upper arm flexion, which was used for 2 palgupchigi techniques: palgupdollyeochigi and palgupollyeochigi. Following this, trunk extension and upper arm abduction was used for palguppyojeokchigi, trunk extension and upper arm adduc- tion was used for meong-echigi, and trunk left rotation and upper arm external rotation was used for palgupyeopchigi.
|
Trunk |
Upper arm |
Frequency |
% |
|
Extension |
Flexion |
2 |
2.11 |
|
Extension |
Abduction |
1 |
1.05 |
|
Extension |
Adduction |
1 |
1.05 |
|
Left rotation |
External rotation |
1 |
1.05 |
5) Classification of jjireugi techniques
Jjireugi techniques account for 3 of the 95 Taekwondo hand techniques. Table 9 shows the results of classifying the jjireugi techniques according the size of angular momentum for different movements of individual segments. Of the 144 possible forms, 2 were used in classifying the jjireugi techniques.
|
Trunk |
Upper arm |
Forearm |
Frequency |
% |
|
Extension |
Flexion |
Extension |
2 |
2.11 |
|
Extension |
Flexion |
Supination |
1 |
1.05 |
The form with the highest frequency was trunk exten-sion, upper arm flexion, and forearm extension, which was used for 2 techniques: pyeonsonkkeutsewojjireugi and pyeonsonkkeuteopeojjireugi. This was followed by trunk extension, upper arm flexion, and forearm supination, which was used for pyeonsonkkeutaraejeochyeojjireugi.
3. Proposals for names based on the forms used in hand techniques
Unified names were proposed for the classified makgi, jireugi, chigi, palgupchigi, and jjireugi techniques based on their forms, and these are presented in Tables 10~15.
There have been constant efforts using various methods to classify and establish terminology for the numerous Taekwondo hand techniques. Kang et al. (2008), Kukkiwon (2006), Sung (2011), Lee et al. (2009, 2010), and Choi & Lim (2013) attempted to classify Taekwondo techniques using a systematic method. However, because they used the technique's objectives (defense/attack) or external move- ments as the basis for classification, these methods failed to account for the forces acting on individual segments and joints, as well as the effects of those forces. Therefore, this study classified Taekwondo hand techniques according to the angular momentum in the trunk, upper arm, and forearm when performing the 95 hand techniques in the official poomsae, and also proposed names according to the classified forms. First, in order to classify the forces that act on each segment when performing Taekwondo hand techniques, and the various movements that result from those forces, the angular momentum of each segment was analyzed, and the movement with the largest angular momentum was determined to be the representative move- ment for the relevant segment. Here, angular momentum is a quantitative measure of the amount of rotational movement, and it represents the effects of the rotational force. Specifically, it is a biomechanical parameter deter-mined by the product of a rotational motor parameter—angular velocity—and a measure of inertia—the moment of inertia. Angular momentum consists of local and global angular momentum, which means that during rotational movement of the body, not only does each segment generate local rotation relative to the segment's center, but it also generates rotational movement relative to the body's center (KSSB, 2015; Hamill & Ryu, 2003). Hence, for the Taekwondo techniques occurring within a linked system connected by joints, both the local and global angular momenta were calculated for each segment.
|
Segments' |
First |
Second |
Third
classification |
Section |
|
Trunk
extension Upper
arm flexion Forearm
extension |
Makgi |
Mom pyeo Pal deuleo Bbeodeo makgi |
Eolgulmakgi |
- |
|
Sonnalmomtongmakgi |
- |
|||
|
Jebipummokchigi |
Hansonnaleolgulmakgi |
|||
|
Momtonggeodeureomakgi |
- |
|||
|
Oesanteulmakgi |
Araeyeopmakgi |
|||
|
Oesanteulmakgi |
Anpalmokeolgulyeopmakgi |
|||
|
Geumgangmakgi |
Araeyeopmakgi |
|||
|
Geumgangmakgi |
Eolgulmakgi |
|||
|
Santeulmakgi |
Eolgulanmakgi |
|||
|
Santeulmakgi |
Anpalmokeolgulyeopmakgi |
|||
|
Geumgangmomtongmakgi |
Eolgulmakgi |
|||
|
Anpalmokeolgulgeodeureoyeopmakgi |
- |
|||
|
Hwangsomakgi |
- |
|||
|
Sonbadakmomtonggeodeureobakkatmakgi |
- |
|||
|
Sonnaldeungmomtongakgi |
- |
|||
|
Hansonnaleolgulmakgi |
- |
|||
|
Geumgangapjireugi |
Eolgulmakgi |
|||
|
Momtonggeodeureoanmakgi |
- |
|||
|
Anpalmokmomtonggeodeureobakkatmakgi |
- |
|||
|
Geumgangyeopjireugi |
Eolgulmakgi |
|||
|
Sonnaloesanteulmakgi |
Hansonnalaraeyeopmakgi |
|||
|
Sonnaloesanteulmakgi |
Sonnaldeungeolgulyeopmakgi |
|||
|
Sonnalgeumgangmakgi |
Hansonnalaraeyeopmakgi |
|||
|
Sonnalgeumgangmakgi |
Hansonnaleolgulmakgi |
|
Segments' representative |
First |
Second classification |
Third classification (makgi
techniques) |
Section |
|
Trunk extension Upper arm flexion Forearm pronation |
Makgi |
Mom pyeo Pal deuleo Palmokbakkatandollyeo makgi |
Momtonganmakgi |
- |
|
Momtongmakgi |
- |
|||
|
Hansonnalmomtongmakgi |
- |
|||
|
Trunk extension Upper arm flexion Forearm supination |
Mom pyeo Pal deuleo Palmokandollyeo makgi |
Momtonghechyeomakgi |
- |
|
|
Trunk extension Upper arm abduction Forearm extension |
Makgi |
Mom
pyeo Pal
beollyeo Bbeodeo
makgi |
Hansonnalmomtongbakkatmakgi |
- |
|
Momtongbakkatmakgi |
- |
|||
|
Hansonnaleolgulbiteureomakgi |
- |
|||
|
Eolgulbakkatmakgi |
- |
|||
|
Gawimakgi |
Anpalmokmomtongbakkatmakgi |
|||
|
Hansonnalmomtongyeopmakgi |
- |
|||
|
Geumgangmomtongmakgi |
Anpalmokmomtongbakkatmakgi |
|||
|
Hechyeosanteulmakgi |
- |
|||
|
Anpalmokmomtongbakkatmakgi |
- |
|||
|
Hansonnalmomtongbiteureomakgi |
- |
|||
|
Anpalmokmomtongbiteureomakgi |
- |
|||
|
Trunk extension Upper arm abduction Forearm pronation |
Mom
pyeo Pal
beollyeo Palmokbakkatandollyeo
makgi |
Anpalmokmomtonghechyeomakgi |
- |
|
|
Sonnaldeungmomtonghechyeomakgi |
- |
|||
|
Trunk extension Upper arm adduction Forearm extension |
Mom
pyeo Pal
moa Bbeodeo
makgi |
Batangsonnulleomakgi |
- |
|
|
Trunk extension Upper arm internal rotation Forearm extension |
Mom
pyeo Pal
dollyeo Bbeodeo
makgi |
Gawimakgi |
Araemakgi |
|
|
Trunk extension Upper arm internal rotation Forearm supination |
Mom
pyeo Pal
dollyeo Palmokandollyeo
makgi |
Batangsonmomtongmakgi |
- |
|
|
Batangsonmomtonganmakgi |
- |
|||
|
Batangsonmomtonggeodeureoanmakgi |
- |
|||
|
Trunk flexion Upper arm flexion Forearm extension |
Mom
gupyeo Pal
deuleo Bbeodeo
makgi |
Sonnalaraemakgi |
- |
|
|
Araegeodeureomakgi |
- |
|||
|
Eotgeoreo-eolgulmakgi |
- |
|||
|
Trunk flexion Upper arm abduction Forearm flexion |
Mom
gupyeo Pal
beollyeo Danggyeo
makgi |
Kkeureo-olligi |
- |
|
|
Trunk flexion Upper arm abduction Forearm supination |
Mom
gupyeo Pal
beollyeo Palmokandollyeo
makgi |
Araemakgi |
- |
|
|
Hansonnalaraemakgi |
- |
|||
|
Araeyeopmakgi |
- |
|||
|
Trunk flexion Upper arm adduction Forearm flexion |
Mom
gupyeo Pal
moa Danggyeo
makgi |
Araepyojeokmakgi |
- |
|
|
Trunk flexion Upper arm internal rotation Forearm supination |
Mom
gupyeo Pal
deuleo Palmokandlolyeo
makgi |
Eotgeoreoaraemakgi |
- |
|
|
Sonnaleotgeoreoaraemakgi |
- |
|||
|
Trunk left rotation Upper arm extension Forearm supination |
Mom
dollyeo Pal
deuleo Palmokandollyeo
makgi |
Araehechyeomakgi |
- |
|
|
Sonnalaraehechyeomakgi |
- |
|
Segments' representative |
First |
Second
classification |
Third
classification |
Section |
|
Trunk extension Upper arm flexion Forearm extension |
Jireugi |
Mom pyeo Pal deuleo Bbeodeo jireugi |
Momtongbandaejireugi |
- |
|
Momtongbarojireugi |
- |
|||
|
Eolgulbandaejireugi |
- |
|||
|
Dujumeokjeochyeojireugi |
- |
|||
|
Momtongyeopjireugi |
- |
|||
|
Danggyeoteokjireugi |
- |
|||
|
Pyojeokjireugi |
- |
|||
|
Chetdarijireugi |
Momtongbarojireugi |
|||
|
Geumgangapjireugi |
Momtongbandaejireugi |
|||
|
Geumgangyeopjireugi |
Momtongyeopjireugi |
|||
|
Trunk extension Upper arm external rotation Forearm pronation |
Mom pyeo Pal dollyeo Palmokbakkatandollyeo jireugi |
Chijireugi |
- |
|
|
Trunk left rotation Upper arm external rotation Forearm supination |
Mom dollyeo Pal dollyeo Palmokandollyeo jireugi |
Keundoljjeogwi |
- |
|
Segments'
representative |
First |
Second
classification |
Third
classification (chigi techniques) |
Section |
|
Trunk
extension Upper
arm flexion Forearm
extension |
Chigi |
Mom pyeo Pal deuleo Bbeodeo chigi |
Hansonnalmokchigi |
- |
|
Jebipummokchigi |
Hansonnalmokchigi |
|||
|
Kaljaebi |
- |
|||
|
Mureupkkeokkgi |
- |
|||
|
Batangsonteokchigi |
- |
|||
|
Mejumeokpyojeokchigi |
- |
|||
|
Geodeureokaljaebi |
- |
|||
|
Trunk
extension Upper
arm abduction Forearm
extension |
Mom pyeo Pal beollyo Bbeodeo chigi |
Deungjumeokapchigi |
- |
|
|
Chetdarijireugi |
Mejumeokbakkatchigi |
|||
|
Trunk
extension Upper
arm adduction Forearm
extension |
Mom pyeo Pal moa Bbeodeo chigi |
Deungjumeokdanggyeochigi |
- |
|
|
Trunk
extension Upper
arm internal rotation Forearm
extension |
|
Mom
pyeo Pal
dollyeo Bbeodeo
chigi |
Mejumeoknaeryeochigi |
- |
|
Trunk
extension Upper
arm internal rotation Forearm
pronation |
Chigi |
Mom
pyeo Pal
dollyeo Palmokbakkatandollyeo
chigi |
Dumejumeokyeopgurichigi |
- |
|
Trunk
flexion Upper
arm abduction Forearm
extension |
Mom
gupyeo Pal
beollyo Bbeodeo
chigi |
Mejumeokbakkatchigi |
- |
|
|
Deungjumeokbakkatchigi |
- |
|||
|
Hansonnalbakkatchigi |
- |
|||
|
Deungjumeokeolgulgeodeureoapchigi |
- |
|||
|
Hansonnalyeopchigi |
- |
|
Segments' representative |
First |
Second classification |
Third classification (palgupchigi techniques) |
Section |
|
|
Trunk extension Upper arm flexion |
Palgupchigi |
Mom pyeo Pal deuleo palgupchigi |
Palgupdollyeochigi |
- |
|
|
Palgupollyeochigi |
- |
||||
|
Trunk extension Upper arm abduction |
Mom pyeo Pal beollyo palgupchigi |
Meong-echigi |
- |
||
|
Trunk extension Upper arm adduction |
Mom pyeo Pal moa palgupchigi |
Palguppyojeokchigi |
- |
||
|
Trunk left rotation Upper arm external rotation |
Mom dollyeo Pal dollyeo palgupchigi |
Palgupyeopchigi |
- |
||
|
Segments' |
First |
Second
classification |
Third
classification (jjireugi techniques) |
Section |
|
Trunk extension Upper arm flexion Forearm extension |
Jjireugi |
Mom
pyeo Pal
deuleo Bbeodeo
jjireugi |
Pyeonsonkkeutsewojjireugi |
- |
|
Pyeonsonkkeuteopeojjireugi |
- |
|||
|
Trunk extension Upper arm flexion Forearm pronation |
Mom
pyeo Pal
deuleo Palmokbakkatdollyo
jjireugi |
Pyeonsonkkeutaraejeochyeojjireugi |
- |
Concerning the frequency of techniques showing the highest angular momentum of the trunk in a particular direction, extension, which had the largest angular momen- tum in 76 techniques, showed the highest frequency among the techniques of extension, flexion, right flexion, left flexion, right rotation, and left rotation. Flexion was the next most frequent with 15 techniques, and was followed by left rotation with 4 techniques. For the trunk segment, with regard to mean angular velocity, which influences angular momentum, the peak angular velocities were 13.56±6.27 rad/s, -5.97±4.53 rad/s, and 7.86±4.90 rad/s for extension, flexion, and left rotation, respectively. This means that not only did extension show a faster angular velocity than left rotation, but it is also thought to indicate that the angular movements for flexion and extension around the X-axis (left-right axis) were larger because the vertical length of the trunk means that they have a large radius. Thus, 91 out of the 95 hand techniques were classified using trunk movements of either flexion or extension. This is consistent with Taekwondo textbooks (Kukkiwon, 2006) that suggest that the trunk should be straight when performing hand techniques. Moreover, the lack of any techniques showing right rotation is thought to be because all techniques were performed with the left hand. Considering the move- ments of the upper arm and the frequency of techniques for which that movement had the largest angular momen- tum, flexion was the most frequent with a frequency of 53, followed by abduction with a frequency of 25, and internal rotation with a frequency of 8. These results indi-cate that 56% of Taekwondo hand techniques are perfor-med with the upper arm being lifted and moved anteriorly, while 26% consist of it being moved out to the side. This suggests that the majority of Taekwondo hand techniques were classified as flexion or abduction, despite the low angular velocities for flexion/extension and abduction/ adduction, as a result of the large moment of inertia (or rotational resistance) around the X- and Y-axes compared to the Z-axis. Despite these characteristics, the fact that 12% of the techniques showed the largest angular momentum for internal or external rotation is thought to be because the peak velocity for internal/external rotation (9.18±6.04 rad/s) was approximately three-fold higher than the peak velocity for flexion/extension (3.29±2.38 rad/s) or abduction /adduction (2.99±2.22 rad/s). Concerning the forearm, the movement that showed the highest angular momentum in the most techniques was extension, with 67 techniques. As with the upper arm, the reason that most techniques were classified as extension is thought to be because the moment of inertia along the X-axis was far larger than that along the Z-axis.
There were 144 possible forms for classification according to the size of angular momentum for each segment (6 rotational movements for the trunk, 6 for the upper arm, and 4 for the forearm). As above, the 95 Taekwondo hand techniques were classified according to the angular momentum of each segment. Here, a total of 20 out of the 144 theoretically possible forms were used, including 14 forms for 58 makgi techniques, 3 forms for 12 jireugi techniques, 6 forms for 17 chigi techniques, 4 forms for 5 palgupchigi techniques, and 2 forms for 3 jjireugi techni-ques. Here, the form consisting of trunk extension, upper arm flexion, and forearm extension was referred to as "mom pyeo pal deureo bbeodeo— makgi, jireugi, chigi, or jjireugi". This demonstrates that the majority of Taekwondo hand techniques involve forward thrusting, and that this can be considered the most universal technique.
The segments of the arm have more degrees of free-dom than the segments of the leg, meaning that they are capable of producing much more diverse movements. In spite of this, the forms of the hand techniques currently being used in the official Taekwondo poomsae are limited to just 20 out of 144 (13.89%) possible movements. Kang et al. (2005), Kim & Lee (2002), Song & Lim (2012), Yoon et al. (2001), and Jung (2012) have persistently mentioned the homogeneity of Taekwondo techniques, and claimed that the level of difficulty is not high enough. They have also made clear the need to ensure systematicity of tech-niques, to present the principles of existing techniques for the development of new techniques, and to establish an appropriate classification system. Therefore, this study suggests a new classification system that takes into account the movements and forces involved in existing techniques, and proposes names categorized by form, as an example of terminology that reflects the movements of the body. Nevertheless, the problems relating to the difficulty and homogeneity of the Taekwondo poomsae techniques still remain. In the future, in order to improve Taekwondo poomsae techniques and competitions, the difficulty of the current techniques needs to be quantitatively evaluated through a biomechanical comparison with relatively more developed poomsae techniques in other martial arts. Fur-thermore, there needs to be persistent development of new techniques that can be applied to the Taekwondo poomsae, and subsequent analysis of techniques.
This study aimed to analyze angular momentum of the trunk, upper arm, and forearm when performing 95 hand techniques from the official Taekwondo poomsae, to sys-tematically classify the techniques according to the move- ments with the largest angular momentum, and to propose names based on these forms. When the 95 Taekwondo hand techniques were classified, makgi (blocking) tech- niques were classified into 14 forms, jireugi (punching) techniques into 3 forms, chigi (hitting) techniques into 6 forms, palgupchigi (elbow hitting) techniques into 4 forms, and jjireugi (thrusting) techniques into 2 forms. The fol-lowing names were proposed for each form.
1. Forms of makgi technique
1) The "mom pyeo pal deureo bbeodeo makgi" form is defined by representative movements of trunk exten-sion, upper arm flexion, and forearm extension. Tech-niques using this form are jebipummokchigi (hanson-naleolgulmakgi), eolgulmakgi, sonnalmomtongmakgi, momtongkeodeureobakkatmakgi, oesanteulmakgi (anpalmokeolgulyeopmakgi), geumgangmakgi (eolgul- makgi), santeulmakgi (eolgulanmakgi), santeulmakgi (anpalmokeolgulyeopmakgi), geumgangmomtongmakgi (eolgulmakgi), anpalmokeolgulgeodeureoyeopmakgi, hwangsomakgi, sonbadakmomtonggeodeureobakkat-makgi, sonnaldeungmomtongmakgi, hansonnaleolgul- makgi, geumgangapjireugi (eolgulmakgi), momtong-geodeureoanmakgi, geumgangmakgi (araeyeopmakgi), oesanteulmakgi (araeyeopmakgi), sonnalgeumgang-makgi (hansonnalaraeyeopmakgi), anpalmokmomtong- geodeureobakkatmakgi, geumgangyeopjireugi (eolgul- makgi), sonnaloesanteulmakgi (hansonnalaraeyeop-makgi), sonnaloesanteulmakgi (sonnaldeungeolgulyeop- makgi), and sonnalgeumgangmakgi (hansonnaleolgul- makgi).
2) The "mom pyeo pal deureo palmok bakkatdollyeo makgi" form is characterized by representative move-ments of trunk extension, upper arm flexion, and fore- arm supination. The techniques using this form are momtonganmakgi, momtongmakgi, and hansonnal-momtongmakgi.
3) The "mom pyeo pal deureo palmok andollyeo makgi" form is characterized by representative movements of trunk extension, upper arm flexion, and forearm pro-nation. The momtonghechyeomakgi technique uses this form.
4) The "mom pyeo pal beollyeo bbeodeo makgi" form is defined by representative movements of trunk exten-sion, upper arm abduction, and forearm extension. The techniques using this form are hansonnalmomtong-bakkatmakgi, momtongbakkatmakgi, hansonnaleolgul- biteureomakgi, eolgulbakkatmakgi, gawimakgi (anpal-mokmomtongbakkatmakgi), hansonnalmomtongyeop- makgi, geumgangmomtongmakgi (anpalmokmom-tongbakkatmakgi), hechyeosanteulmakgi, anpalmok-momtongbakkatmakgi, hansonnalmomtongbiteureo- makgi, and anpalmokmomtongbiteureomakgi.
5) The "mom pyeo pal beollyeo palmok bakkatdollyeo makgi" form is characterized by representative move-ments of trunk extension, upper arm abduction, and forearm supination. The techniques using this form are anpalmokmomtonghechyeomakgi and sonnaldeung-momtonghechyeomakgi.
6) The "mom pyeo pal moa bbedeo makgi" form is char- acterized by representative movements of trunk exten- sion, upper arm adduction, and forearm extension. The batangsonnulleomakgi technique uses this form.
7) The "mom pyeo pal dollyeo bbeodeo makgi" form is defined by representative movements of trunk exten-sion, upper arm internal rotation, and forearm extension. The gawimakgi (araemakgi) technique uses this form.
8) The "mom pyeo pal dollyeo palmok andollyeo makgi" form is characterized by representative movements of trunk extension, upper arm internal rotation, and fore- arm pronation. The techniques that use this form are batangsonmomtongmakgi, batangsonmomtongan-makgi, and batangsonmomtonggeodeureoanmakgi.
9) The "mom gupyeo pal deureo bbeodeo makgi" form is defined by representative movements of trunk flexion, upper arm flexion, and forearm extension. The tech-niques using this form are sonnalaraemakgi, araegeo-deureomakgi, and eotgeoreo-eolgulmakgi.
10) The "mom gupyeo pal beollyeo danggyeo makgi" form is characterized by representative movements of trunk flexion, upper arm abduction, and forearm flexion. The kkeureo-olligi technique uses this form.
11) The "mom gupyeo pal beollyeo palmok andollyeo makgi" form is defined by representative movements of trunk flexion, upper arm abduction, and forearm pronation. The techniques that use this form are arae-makgi, hansonnalaraemakgi, and araeyeopmakgi.
12) The "mom gupyeo pal moa danggyeo makgi" form is characterized by representative movements of trunk flexion, upper arm adduction, and forearm flexion. The araepyojeokmakgi technique uses this form.
13) The "mom gupyeo pal dollyeo palmok andollyeo makgi" form is defined by representative movements of trunk flexion, upper arm internal rotation, and forearm pronation. The techniques that use this form are eotgeoreoaraemakgi and sonnaleotgeoreoarae-makgi.
14) Finally, the "mom oenjjokdollyeo pal danggyeo palmok andollyeo makgi" form is characterized by represen-tative movements of trunk left rotation, upper arm extension, and forearm pronation. The techniques that use this form are araehechyeomakgi and sonnalara-ehechyeomakgi.
2. Forms of jireugi technique
1) The "mom pyeo pal deureo bbeodeo jireugi" form is characterized by representative movements of trunk extension, upper arm flexion, and forearm extension. The techniques that use this form are momtongban-daejireugi, momtongbarojireugi, eolgulbandaejireugi, dujumeokjeochyeojireugi, momtongyeopjireugi, dang- gyeoteokjireugi, chetdarijireugii (momtongbarojireugi), geumgangapjireugi (momtongbandaejireugi), pyojeo-kjireugi, and geumgangyeopjireugi (momtongyeo-pjireugi).
2) The "mom pyeo pal dollyeo palmok bakkatdollyeo jireugi" form is defined by representative movements of trunk extension, upper arm external rotation, and forearm supination. This form is used by the soseu-mjireugi technique.
3) The "mom oenjjokdollyeo pal dollyeo palmok andollyeo jireugi" form is characterized by representative move-ments of trunk left rotation, upper arm external rota-tion, and forearm pronation. This form is used by the keundoljjeogwi technique.
3. Forms of chigi technique
1) The "mom pyeo pal deureo bbeodeo chigi" form is characterized by representative movements of trunk extension, upper arm flexion, and forearm extension. The techniques that use this form are hansonnalmok-chigi, jebipummokchigi (hansonnalmokchigi), kaljaebi, mureupkkeokkgi, batangsonteokchigi, mejumeokpyo-jeokchigi, and geodeureokaljaebi.
2) The "mom pyeo pal beollyeo bbeodeo chigi" form is defined by representative movements of trunk exten-sion, upper arm abduction, and forearm extension. The techniques that use this form are deungjumeokapchigi and chetdarijireugi (mejumeokbakkatchigi).
3) The "mom pyeo pal moa bbeodeo chigi" form is characterized by representative movements of trunk extension, upper arm adduction, and forearm extension. This form is used by the deungjumeokdanggyeoteok-chigi technique.
4) The "mom pyeo pal dollyeo bbedeo chigi" form is defined by representative movements of trunk exten-sion, upper arm internal rotation, and forearm extension. This form is used by the mejumeoknaeryeochigi tech-nique.
5) The "mom pyeo pal dollyeo palmok bakkatdollyeo chigi" form is defined by representative movements of trunk extension, upper arm internal rotation, and forearm supination. This form is used by the dume-jumeokyeopgurichigi technique.
6) The "mom gupyeo pal beollyeo bbedeo chigi" form is characterized by representative movements of trunk flexion, upper arm abduction, and forearm extension. The techniques that use this form are mejumeokbak-katchigi, deungjumeokbakkatchigi, hansonnalbakkat-chigi, deungjumeokeolgulgeodeureoapchigi, and han-sonnalyeopchigi.
4. Forms of palgupchigi technique
1) The "mom pyeo pal deureo palgupchigi" form is char- acterized by representative movements of trunk exten- sion and upper arm flexion. This form is used by the palgupdollyeochigi and palgupollyeochigi techniques.
2) The "mom pyeo pal beollyeo palgupchigi" form is characterized by representative movements of trunk extension and upper arm flexion. The meong-echigi technique uses this form.
3) The "mom pyeo pal moa palgupchigi" form is defined by representative movements of trunk extension and upper arm flexion. The palguppyojeokchigi technique uses this form.
4) The "mom oenjjokdollyeo pal dollyeo palgupchigi" form is defined by representative movements of trunk extension and upper arm flexion. The palgupyeopchigi technique uses this form.
5. Forms of jjireugi technique
1) The "mom pyeo pal deureo bbeodeo jjireugi" form is defined by representative movements of trunk exten- sion, upper arm flexion, and forearm extension. This form is used by the pyeonsonkkeutsewojjireugi and pyeonsonkkeuteopeojjireugi techniques.
2) The "mom pyeo pal deureo palmok bakkatdollyeo jjireugi" form is characterized by representative move- ments of trunk extension, upper arm flexion, and fore- arm supination. This form is used by the pyeonsonk-keutaraejeochyeojjireugi technique.
References
1. Challis, J. H. (1996). Accuracy of human limb moment of inertia estimations and their influence on resultant joint moments. Journal of Applied Biomechanics. 12(4), 517-530.
Crossref
2. Choi, C. S. & Lim, T. H. (2013). Classification of Taekwondo skills based on the gentile's motor learning theory. Taekwondo Journal of Kukkiwon, 4(3), 57-81.
3. Hamill, J. & Ryu, J. S. (2003). Experiment in Sport Bio-mechanics: Daehanmedia.
Crossref
Google Scholar
4. Jung, H. D. (2012). Study for development method of official poomsae match of Taekwondo. Journal of Korean Society for the Study Physical Education, 17(3), 131-141.
Crossref
Google Scholar
5. Kang, I. P., Kim, S. D., Lim, D. S. & Jung, H. D. (2005). The comparative analysis on the Taekwondo approved- poomsae and created-poomsae. Korea Sport Research, 17(1), 437-454.
Crossref
Google Scholar
6. Kang, S. C., Jung, S. G., Lee, J. K., Park, S. Y., Jun, J. W., Jang, K., Lim, S. J., Kim, J. H., Lee, Y. L., Choi, H. M., Park, J. H. & Choi, C. S. (2008). Research of Taekwondo Termi-nology Compilation; Kukkiwon Research Institute of Taekwondo.
Crossref
PubMed
7. Kim, K. S. & Lee, K. H. (2002). The systemicity study of Taekwondo poomsae action composition. The Korean Society of Sports Science, 11(1), 319-330.
Crossref
Google Scholar
8. Korean Society of Sport Biomechanics [KSSB] (2015). Sport Biomechanics; Daehanmedia.
Crossref
9. Kukkiwon (2006). Taekwondo Textbook; Osung.
Crossref
10. Lee, B., Park, S. Y., Lim, S. J., Jung, J. H., Kim, J. H., Lee, C. H., Park, J. H. & Choi, C. S. (2009). Research of Taekwondo Terminology Compilation; Kukkiwon Research Institute of Taekwondo.
Crossref
11. Lee, B., Park, S. Y., Lim, S. J., Jung, J. H., Kim, J. H., Lee, C. H., Park, J. H. & Choi, C. S. (2010). Taekwondo Technical Terminology Book; Kukkiwon Research Institute of Taekwondo.
Crossref
PubMed
12. Ryu, J. S. (2009). The temporal coordination of the lower extremity by increasing high-heel height during walking. Korean Journal of Sport Biomechanics, 19(3), 593-601.
Crossref
Google Scholar
13. Sung, L. J. (2011). A study on the classification of Taekwondo techniques based on the structure and function of human body. Taekwondo Journal of Kukkiwon, 2(2), 109-132.
Crossref
14. Song, N. J. & Lim, S. J., (2012). Investigation into the Di-rectivity of Taekwondo Poomsae Competition through the Comparative Analysis of Kata, Taou and Poomsae. Korean Philosophy Society for Sport & Dance, 20(1), 157-179.
Crossref
15. Yoo, S. H. (2009). Libro de Taekwondo; Korea International Cooperation Agency [KOICA].
Crossref
16. Yoo, S. H. (2015). Classification of the Hand Techniques by Angular Momentum in the Taekwondo Poomsae. Un- published Doctor's Thesis. Graduate School of Korea National Sport University.
Crossref
17. Yoon, S. H., Cho, C. S. & Kim, K. S. (2001). The systemicity study of Taekwondo poomsae action composition. Institute of Martial Arts, Yongin University, 12(1), 129 -141.
Crossref
18. Winter, D. A. (2009). Biomechanics and Motor Control of Human movement. Fourth edition.
Crossref
Google Scholar
