Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Deuk-Gon Lee
Woen-Sik Chae
10.5103/KJAB.2026.36.2.99 Epub 2026 June 30
Abstract
Objective: The purpose of this study was to investigate muscle activation patterns and ground reaction force characteristics of Taekwondo athletes during a rotational lunge movement under varying inertial loads using an Aquabag, and to explore potential loading strategies for functional movement training.
Method: Nine national-level male taekwondo breaking athletes without musculoskeletal disorders (age 20.2 ± 1.56 yrs, height 174.2 ± 3.77 cm, weight 70.1 ± 8.63 kg, career 14.7 ± 2.0 yrs) participated. Inertial load conditions were 0%, 5%, 10% body mass using an Aquabag. Surface electromyography (QEMG8, Laxtha Inc., Korea) was recorded from left-side trunk muscles (rectus abdominis, external oblique, erector spinae), gluteal (gluteus medius), thigh (rectus femoris, biceps femoris), and shank muscles (gastrocnemius, tibialis anterior). Ground reaction forces and movement phases were analyzed using force plates and 3D motion capture. One-way repeated-measures ANOVA with Bonferroni post hoc tests was performed (α = .05).
Results: As inertial resistance increased, mean and peak integrated EMG of the tibialis anterior significantly increased during the push phase (p = .002, p = .005). During the pull phase, significant increases in muscle activation were observed in the rectus femoris (p = .008, p = .002), biceps femoris (p = .002), gastrocnemius (p = .005), and tibialis anterior (p = .006, p = .002). Left foot Fz ground reaction force at SP and EE events significantly increased with resistance (p = .002, p < .001), and right foot Fx at EE also increased (p < .001). Right foot CoPy showed significant differences during EE-SP and RP-EE phases (p < .001, p = .016). Ankle and knee joint angles showed significant differences, but no consistent increasing or decreasing pattern with increasing resistance.
Conclusion: These findings suggest that adjusting inertial resistance using an Aquabag may serve as a training tool to induce lower limb-centered neuromuscular responses and load regulation characteristics. Future studies should compare kinematic and kinetic differences across Aquabag shape and tool position variations during movement to clarify the application range and characteristics of Aquabag training.
Keywords
Functional training Aquabag GRF Taekwondo EMG
태권도는 다양한 발차기 기술을 중심으로 대부분의 동작이 몸통과 하지 분절의 협응을 통해 수행되며, 수직축 회전을 이용해 분절들이 빠르게 움직이는 특성이 있다(Estevan, Falco, Silvernail & Jandacka, 2015). 특히 발차기 동작은 하지 분절뿐만 아니라 몸통의 회전 움직임을 통해 발끝 속도 생성과 동작 효율성에 중요한 영향을 미치는 것으로 보고되고 있다(Falco et al., 2009; Falco, Estevan & Vieten, 2011). Choi (2013)는 돌려차기와 뒤후려차기와 같은 고난도 기술을 수행하는 태권도 선수들이 몸통 회전을 기반으로 타격하는 특성을 보인다고 보고하여 태권도 선수에게 몸통 회전의 중요성을 강조하였다. 또한, 태권도 돌려차기 동작에서 신체 분절의 기여도를 분석한 연구에서는 발차기 수행 시 대퇴 분절의 회전에 이어 몸통 회전이 발끝 속도 생성에 유의한 기여를 하는 것으로 나타나 상체 회전 움직임의 중요성이 보고된 바 있다(Jung & Park, 2022). 이러한 결과는 태권도 기술 수행 과정에서 상체 회전 움직임과 이를 안정적으로 지지하는 하지의 역할이 운동 수행과 밀접하게 관련되어 있음을 시사한다. 태권도 발차기 동작에서는 편측 지지 상태에서 체중 이동과 몸통 회전을 통해 회전력을 생성하고 이를 하지 분절로 전달하는 과정이 요구된다. 런지 기반 회전 동작 역시 편측 지지 상태에서 체중 이동과 몸통 회전을 동시에 수행해야 하므로, 태권도 발차기 수행 과정에서 요구되는 자세 조절 및 회전 기반 움직임 특성을 포함한다(Kuntze, Mansfield & Sellers, 2010). 특히 태권도는 회전과 체중 이동이 빈번하게 나타나는 종목이라는 점에서, 이러한 회전 기반 움직임 특성을 분석하는 것은 의미가 있을 것으로 판단된다.
최근 트레이닝 분야에서는 이러한 상체 회전 동작과 신체 안정성을 향상시키기 위해 다양한 기능성 트레이닝 방법이 인기를 끌고 있으며(Jeong & Hong, 2018), 그 중 물의 관성을 이용하여 신체의 불안정성을 조절하는 아쿠아백 트레이닝이 주목받고 있다(Wezenbeek et al., 2022). 아쿠아백은 내부의 유체는 움직임 과정에서 지속적으로 위치가 변화하며, 이에 따라 질량 중심과 관성 방향이 비정형적으로 변하게 된다(Wezenbeek et al., 2022). 이러한 유체 기반 관성 저항은 고정된 질량을 사용하는 전통적 저항 도구와 달리 예측하기 어려운 외적 교란(perturbation)을 유발하며, 운동 수행 과정에서 신체의 지속적인 자세 조절 및 협응 반응을 요구하는 특성이 있다(Ditroilo et al., 2018). 아쿠아백과 같은 불안정성 도구는 운동 수행 과정에서 예측하기 어려운 저항 변화를 유발하여 신체의 안정화 요구를 증가시키는 특징을 가지며, 이러한 특성으로 인해 기능성 및 회전 기반 트레이닝에 널리 활용되고 있다(Behm & Colado, 2012; Kibler, Press & Sciascia, 2006). 유체를 이용한 회전 기반 동작은 신체 안정성 및 협응 능력과 관련된 트레이닝 방법으로 다양한 스포츠 종목에서 활용되고 있으며, 관성 기반 저항은 운동 수행 과정에서 지속적으로 변화하기 때문에 신체의 안정화 전략에 다양한 영향을 미치는 것으로 보고되고 있다(Behm & Anderson, 2006; Donovan et al., 2016; Kang, Lee & Park, 2023).
회전 동작 수행 시 신체의 안정성을 유지하기 위해서는 체간 및 하지 근활성도와 지면반력의 적절한 조절이 중요하다. 회전 동작에서는 상체 분절의 움직임에 의해 발생하는 관성이 하지로 전달되기 때문에 근활성도와 지면반력 특성은 신체 균형 유지와 효율적인 동작 수행에 중요한 역할을 한다(Cole & Grimshaw, 2016; Hume, Keogh & Reid, 2005). 이러한 운동역학적 특성을 분석하는 것은 회전 동작 수행 과정에서 나타나는 신체의 안정화 전략을 이해하는 데 중요한 정보를 제공할 수 있다.
그러나 현재까지 보고된 태권도 관련 생체역학 연구는 주로 발차기 동작의 운동학적 특성이나 충격력 분석, 점프 및 착지 동작의 역학적 특성에 초점으로 이루어져 왔으며(Falco et al., 2009; Park & Kim, 2023; Pieter & Pieter, 1995), 회전 기반 트레이닝 동작 수행 과정에서 나타나는 특성을 분석한 연구는 상대적으로 부족한 실정이다. 특히 관성 저항의 변화가 회전 동작 수행 시 운동역학적 특성에 어떠한 영향을 미치는지에 대한 체계적인 분석은 제한적으로 이루어지고 있다. 이러한 특성을 규명하는 것은 회전 기반 트레이닝 수행 시 적절한 저항 조건을 이해하는 데 중요한 근거를 제공할 수 있을 것으로 사료된다.
따라서 관성 저항을 이용한 회전 동작 시 나타나는 근활성도 및 지면반력 특성을 분석하는 것은 회전 기반 트레이닝 동작의 운동역학적 특성을 이해하는 데 중요한 기초 자료가 될 수 있을 것으로 판단된다. 이에 본 연구는 아쿠아백 관성 저항 변화가 태권도 선수의 런지 자세 회전 동작 시 근활성도와 지면반력에 미치는 영향을 분석하고자 한다.
1. 연구대상자
본 연구에서는 관성 저항 변화에 따른 런지 자세 회전 동작 시 근활성도 및 지면반력 특성을 비교·분석하기 위해 전국대회 출전 경험이 있는 숙련자로 인체 근골격계에 이상이 없고 오른발을 주로 사용하는 남자 태권도 선수 9명(나이 20.2±1.56 yrs, 신장 174.2±3.77 cm, 체중 70.1±8.63 kg, 경력 14.7±2.0 yrs)을 피험자로 선정하였다.
2. 실험장비
1) 도구 종류
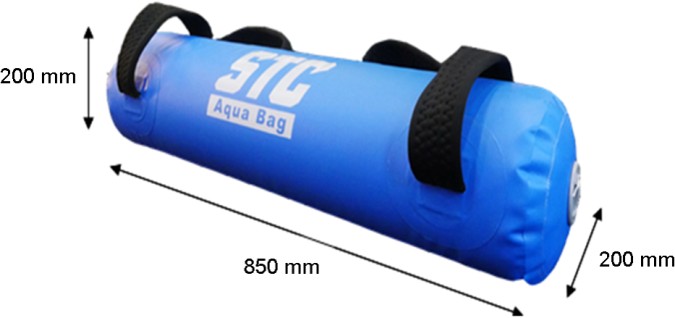
본 실험에서는 런지 자세 회전 동작을 수행하기 위해 3개의 아쿠아백(200 mm × 200 mm × 850 mm)을 사용하였다. 관성 저항 조건은 아쿠아백 내부 유체량을 조절하여 설정하였으며, 유체량 변화는 움직임 과정에서 발생하는 질량 이동 및 관성 교란의 크기에 영향을 미치도록 하였다. 각 조건의 무게는 피험자의 체중의 0%, 5%, 10%로 조절하여 설정하였다(Figure 1).
2) 근전도
체간 및 하지 근육의 근활성도 측정을 위해 근전도 측정기기(QEMG8, Laxtha Inc, Korea)를 사용하였다. 표면 전극은 근섬유의 수축 방향과 평행되도록 하여, 피험자의 좌측 체간 3부위, 복직근(rectus abdominis), 외복사근(external oblique), 척추기립근(erector spinae)과 하지 5부위, 중둔근(gluteus medius), 대퇴직근(rectus femoris), 대퇴이두근(biceps femoris), 내측 비복근(gastrocnemius medial), 전경골근(tibialis anterior)에 부착하였다(Table 1). 오른발을 주로 사용하는 선수들로 지지발이 되는 왼발을 부착 위치로 선정하였다. 접지 전극은 상전장골극(anterior superior iliac spine)에 부착하였다(U. S. Department of health and Human Service, 1993).
|
Electrode |
MVIC |
Electrode |
MVIC |

|
Lie flat on your back and raise your
upper body around the hip joint, lifting the scapula off the ground.
Resistance is applied vertically downward at both shoulders. |

|
Lie on your side and
raise your upper body around the hip joint, lifting the scapula off the
ground. Resistance is applied vertically downward at the left shoulder. |
|
rectus abdominis |
external oblique |
||
|
Lie prone and lift the upper body
around the hip joint. Resistance is applied vertically downward at |

|
Lying on the side, the knee joint |
|
erector spinae |
gluteus medius |
||

|
Sit in a chair and position the |

|
Sit in a chair and position the |
|
rectus femoris |
biceps femoris |
||

|
Seated on a chair with
the |

|
Standing upright.
Resistance is |
|
gastrocnemius |
tibialis anterior |
3) 3차원 동작분석
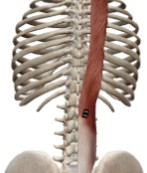
본 연구에서는 런지 자세 회전 동작 시 3차원 동작분석을 위해 3대의 디지털 캠코더(60 Hz, Sony HDR-HC9)를 피험자의 정면, 좌·우 방향에 설치하였다. 실험 전 calibration frame을 설치하여 실험 공간의 전역 좌표계를 설정하였으며, 좌·우 방향을 X축, 전·후 방향을 Y축, 수직 방향을 Z축으로 설정하였다. 또한, 관절 각도는 <Figure 2>와 같이 설정하였다. 인체 분절의 운동학적 자료를 수집하기 위해 직경 0.8 cm 크기의 반사마커를 상지 및 하지의 해부학적 기준점에 부착하였으며, 지역 좌표계 설정을 위해 스틱형 외부 마커를 좌·우측 하퇴에 부착하였다. 이를 기반으로 골반, 대퇴, 하퇴 및 발 분절을 모델링하였다. 지면반력 자료와 근전도 자료는 동작분석 시스템과 동기화하여 수집하였으며, 각 장비는 동조용 발광다이오드 장비를 이용하여 시간 동기화(time synchronization)를 실시하였다.
3. 실험절차
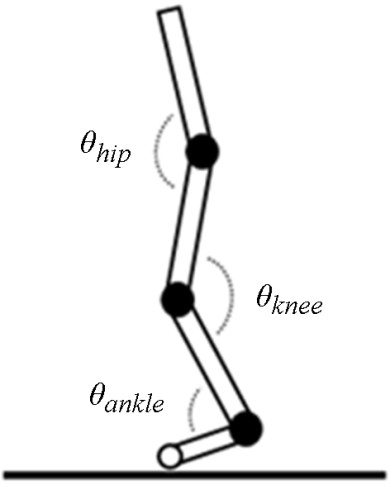
실험에 참여한 모든 피험자는 실험에 앞서 부상을 방지하기 위해 충분한 준비운동을 실시하였으며, 본 실험에 대한 이해도와 런지 자세 회전 동작에 대한 숙련도를 높이기 위해 연습 시간을 제공하였다. 실험 중 피부 저항을 최소화하기 위해 전극 부착 부위의 털을 제거하고 알코올 솜을 사용하여 닦은 후 젤 타입의 표면 전극을 부착하였다. 런지 자세 회전 동작 시 구간 설정 및 관절 각도 분석을 위한 3차원 동작분석을 수행하기 위해 피험자의 전 중앙과 좌·우 방향 5 m 지점에 디지털 캠코더(Sony HDR-HC9, 60 frames/s) 3대를 설치하여 촬영하였다. 지면반력 값과 압력중심 변위 측정은 지면반력기(AMTI, OR6-5) 2대를 사용하였다(Figure 3).
본 연구에서는 태권도 발차기 동작은 한 발 지지와 같은 불안정한 자세에서 수행되는 경우가 많기 때문에 이러한 환경을 조성하기 위한 방법으로 런지 자세에서 회전 동작을 수행하도록 실험 조건을 설정하였으며, 런지 동작은 좌측 하지는 전방, 우측 하지는 후방에 위치하도록 통일하였다. 또한, 좌측 하지의 대퇴 분절은 지면과 평행, 상체는 지면과 수직인 상태에서 좌측으로 회전하여 도구를 미는 동작을 수행하였다. 런지 자세 회전 동작의 일관성을 확보하기 위해 각 피험자의 체중을 고려하여 아쿠아백 무게를 피험자 체중의 0%, 5%, 10%로 조절하여 설정하였다. 관성 저항 변화에 따른 3가지 조건에 대해 무작위 순으로 동작을 실시하였으며, 근육의 피로도를 줄이기 위해 3가지 측정 조건 사이에 5분의 휴식을 제공하였다.
4. 자료분석
1) 주요 시점 및 구간 설정
런지 자세 회전 동작 시 관성 저항 변화에 따른 근활성도와 지면반력 값을 비교·분석하기 위해 3개의 시점(event)과 2개의 구간(phase)으로 나누어 분석하였다. 동작을 하기 전 준비 시점(setup position, SP), 상체 회전하여 팔꿈치가 최대로 펴 진 시점(maximum elbow extension, EE), 준비 자세로 되돌아오는 시점(return position, RP)으로 설정하였으며, 시점 SP-EE 사이를 미는 구간(push phase), 시점 EE-RP 사이를 당기는 구간(pull phase)으로 설정하여 구간별 자료를 분석하였다.
2) 근전도 분석
근전도 데이터의 일반화 작업을 위해서 실험 전 최대 수의적 정적 수축(maximal voluntary isometric contraction; MVIC)을 측정하여, 샘플링 속도 1,024 Hz로 모든 근전도 자료를 수집하였다. 런지 자세 회전 동작 시 수집된 근전도 자료는 10~350 Hz의 Band-pass 필터링을 한 후 전파 정류 처리하였다(Merletti & Cerone, 2020). 이후 아래의 공식을 통해 런지 자세 회전 동작 시 측정된 근전도 자료를 근육별 MVIC 값으로 표준화하여 구간별 평균 및 최대 적분근전도 값을 산출하였다. 평균 적분근전도(average IEMG)는 실제 런지 자세 회전 동작 시 측정된 근전도 값을 MVIC 값으로 나누어 특정 구간의 평균 값을 제시하였다. 또한, 최대 적분근전도(peak IEMG)는 실제 런지 자세 회전 동작 시 측정된 근전도 값을 MVIC 값으로 나누어 특정 구간 내에서 50 ms 이동 평균(moving average)을 통해 산출한 자료 중 최대 값을 제시하였다.
nEMG는 표준화된 적분근전도 값, EMGraw는 런지 자세 회전 동작 시 특정 구간의 근전도 값, EMGmax는 최대 정적 수축 근전도 값이다.
3) 지면반력
지면반력기를 통해 Fx(좌우), Fy(전후), Fz(수직) 방향의 지면반력 값과 압력중심 변위 값을 분석하였으며, 모든 지면반력 자료의 샘플링 속도 1,000 Hz로 수집하였다. 측정된 지면반력 자료는 KwonGRF 2.0 program (Visol Inc., Korea)을 사용하였으며, 20 Hz 저역통과 필터(Matlab 6.5)를 사용하여 노이즈를 제거하였다. 런지 자세 회전 동작 시 수집된 지면반력 값은 피험자의 체중으로 표준화하였다.
4) 동작분석
동작분석 자료는 Kwon3D 3.10 program (Visol Inc., Korea)을 사용하였으며, 3차원 좌표값을 얻기 위해 직접 선형 변환 방법(Direct Linear transformation, Abdel-Aziz & Karara, 1971)을 사용하였다. 또한, 영상 좌표화 과정에서 발생되는 노이즈를 최소화하기 위해 2차 Butterworth low-pass digital filter를 사용하였다. 이때, 차단주파수는 8 Hz로 설정하였다. 본 연구에서는 좌·우 방향을 X축, 전·후 방향을 Y축, 수직 방향을 Z축으로 설정하였다.
5. 통계처리
본 연구에서는 런지 자세 회전 동작 시 아쿠아백 관성 저항 변화에 따른 근활성도 및 지면반력 값의 통계적 유의차를 검증하기 위해 SPSS 29.0 프로그램을 사용하였다. 정규성 검정은 Shapiro-Wilk test와 왜도(skewness), 첨도(kurtosis)를 통해 확인하였다. 정규성 가정을 충족한 변수는 one-way repeated measures ANOVA를 실시하였으며, 사후검증은 Bonferroni 방법을 사용하였다. 반면, 정규성 가정을 충족하지 않은 변수는 Friedman 검정을 실시하였다. 또한, 효과크기(effect size)는 partial η2와 Kendall's W를 함께 제시하였으며, 모든 검증의 유의성 수준은 α = .05로 설정하였다.
런지 자세 회전 동작 시 아쿠아백 관성 저항 변화에 따른 체간 근육인 복직근, 외복사근, 척추기립근과 하지 근육인 중둔근, 대퇴직근, 대퇴이두근, 비복근, 전경골근에 대한 평균 및 최대 적분근전도 값을 측정한 결과는 다음과 같다(Table 2). Push phase에서는 전경골근의 평균 및 최대 적분근전도(p = .002, p = .005)가 관성 저항이 증가함에 따라 유의하게 증가하였다. 대퇴직근의 경우 평균 적분근전도가 아쿠아백 관성 저항 변화에 따른 유의한 차이가 나타났으나, 사후검정에서는 조건 간 유의한 차이가 나타나지 않았다. Pull phase 에서는 대퇴직근 평균 및 최대 적분근전도(p = .008, p = .002), 대퇴이두근 평균 적분근전도(p = .002), 비복근 평균 적분근전도(p = .005), 전경골근의 평균 및 최대 적분근전도(p = .006, p = .002) 값이 유의하게 증가하였다. 반면, 복직근, 외복사근, 척추기립근, 중둔근은 관성 저항 조건에 따른 통계적으로 유의한 차이가 나타나지 않았으며, 관성 저항 증가에 따른 일관된 증가 또는 감소 패턴 역시 확인되지 않았다.
|
|
|
|
0% |
5% |
10% |
Statistic (ES [95% CI]) |
p |
|
Rectus |
Push |
AVERAGE |
3.03±2.21 |
2.72±2.27 |
3.24±2.55 |
.667 (.037 [0.00, 1.00]) |
.717 |
|
PEAK |
10.88±10.11 |
7.08±6.61 |
6.01±3.92 |
4.667 (.259 [0.04, 1.00]) |
.097 |
||
|
Pull |
AVERAGE |
1.64±1.71 |
1.41±1.44 |
1.48±1.27 |
4.514 (.251 [0.03, 1.00]) |
.105 |
|
|
PEAK |
4.17±4.87 |
3.17±2.63 |
3.34±3.34 |
4.286 (.238 [0.00, 1.00]) |
.117 |
||
|
External oblique |
Push |
AVERAGE |
7.91±2.2 |
7.38±1.93 |
7.29±1.75 |
.555 (.065 [0.14, 1.00]) |
.585 |
|
PEAK |
19.71±4.6 |
20.65±10.43 |
16.76±4.13 |
2.667 (.148 [0.00, 1.00]) |
.264 |
||
|
Pull |
AVERAGE |
8.15±9.31 |
5.42±4.02 |
5.17±2.14 |
.222 (.012 [0.14, 1.00]) |
.895 |
|
|
PEAK |
14.19±6.63 |
17.69±12.76 |
18.27±11.21 |
2.889 (.160 [0.00, 1.00]) |
.236 |
||
|
Erector spinae |
Push |
AVERAGE |
22.18±20.68 |
16.36±15.53 |
14.95±14.43 |
1.556 (.086 [0.00, 1.00]) |
.459 |
|
PEAK |
66.22±45.24 |
44.8±40.69 |
43.17±43.91 |
2.889 (.160 [0.00, 1.00]) |
.236 |
||
|
Pull |
AVERAGE |
8.82±5.73 |
7.19±5.11 |
8.07±5.96 |
1.275 (.137 [0.00, 1.00]) |
.306 |
|
|
PEAK |
24.35±21.41 |
16.84±12.07 |
25.75±24.1 |
1.781 (.182 [0.00, 1.00]) |
.200 |
||
|
Gluteus medius |
Push |
AVERAGE |
4.59±1.6 |
3.84±1.47 |
3.96±1.72 |
2.985 (.272 [0.00, 1.00]) |
.079 |
|
PEAK |
14.62±7.93 |
10.18±5.41 |
11.27±5.69 |
4.222 (.235 [0.02, 1.00]) |
.121 |
||
|
Pull |
AVERAGE IEMG† |
4.79±2.69 |
4.83±2.87 |
4.73±2.76 |
3.556 (.198 [0.00, 1.00]) |
.169 |
|
|
PEAK |
11.25±6.07 |
9.22±5.46 |
12.95±8.78 |
5.556 (.309 [0.07, 1.00]) |
.062 |
||
|
Rectus femoris |
Push |
AVERAGE |
4.19±1.92 |
4.77±2.78 |
5.48±2.43 |
3.803 (.325 [0.01, 1.00]) |
.043 |
|
PEAK |
10.5±4.22 |
11.66±7.66 |
13.76±6.73 |
1.373 (.147 [0.00, 1.00]) |
.282 |
||
|
Pull |
AVERAGE |
2.84±1.69b |
3.24±1.66c |
4.37±2.28bc |
9.556 (.531 [0.21, 1.00]) |
.008 |
|
|
PEAK |
5.93±3.84 |
6.58±3.78c |
11.18±6.42c |
12.667 (.704 [0.30, 1.00]) |
.002 |
||
|
Biceps femoris |
Push |
AVERAGE |
12.71±8.43 |
13.32±8.37 |
14.27±8.15 |
1.697
(.175 [0.00, 1.00]) |
.215 |
|
PEAK |
30.16±18.61 |
34.13±25.97 |
33.68±18.51 |
.665
(.077 [0.14, 1.00]) |
.528 |
||
|
Pull |
AVERAGE |
8.18±4.09b |
8.61±4.2c |
10.14±4.88bc |
9.786
(.550 [0.22, 1.00]) |
.002 |
|
|
PEAK |
20.81±13.36 |
19.61±9.11 |
23.1±11.98 |
.671 (.077 [0.14, 1.00]) |
.525 |
||
|
Gastrocnemius |
Push |
AVERAGE |
5.06±3.01 |
6.09±4.29 |
5.63±2.94 |
.986 (.110 [0.00, 1.00]) |
.395 |
|
PEAK |
17.89±12.46 |
23.95±19.2 |
19.12±12.11 |
1.166 (.127 [0.00, 1.00]) |
.337 |
||
|
Pull |
AVERAGE |
6.28±5.03b |
6.48±6.37c |
9.24±6.46bc |
10.667 (.593 [0.24, 1.00]) |
.005 |
|
|
PEAK |
18.43±14.84 |
21.17±21.71 |
36.06±26.8 |
4.667 (.259 [0.04, 1.00]) |
.097 |
||
|
Tibialis anterior |
Push |
AVERAGE |
12.99±8.61b |
16.9±10.38 |
22.23±10.77b |
12.667 (.704 [0.30, 1.00]) |
.002 |
|
PEAK |
44.66±28.15 |
53.5±25.68c |
65.16±27.93c |
7.457 (.482 [0.14, 1.00]) |
.005 |
||
|
Pull |
AVERAGE |
4.39±2.35a |
11.16±4.71a |
27.25±22.86 |
7.108 (.470 [0.13, 1.00]) |
.006 |
|
|
PEAK |
19.98±19.03ab |
38.66±20.5ac |
71.78±48.09bc |
12.667 (.704 [0.30, 1.00]) |
.002 |
||
|
Note. asignificant difference between 0% and 5%, bsignificant
difference between 0% and 10%, csignificant difference between 5%
and 10%. Values are presented as F (partial η2). †indicates non-parametric analysis presented as χ2 (Kendall's W) |
|||||||
지면반력 자료를 분석한 결과는 다음과 같다(Table 3). 모든 시점에 대한 Fx 방향에서의 관성 저항 조건(0%, 5%, 10%)에 따른 유의한 차이는 나타나지 않았지만, 시점 EE의 오른발 지면반력 값은 관성 저항이 증가함에 따라 점차 증가하여 조건 간 유의한 차이가 나타났다(p < .001). Fz 방향에서의 시점 SP와 EE의 왼발 지면반력 값이 관성 저항이 증가함에 따라 증가하여 조건 간 유의한 차이가 나타났다(p = .002, p < .001). 반면, Fz 방향의 오른발 지면반력 값은 모든 시점에서 관성 저항 조건에 따른 유의한 차이가 나타나지 않았다. 또한, 압력중심 변위를 분석한 결과(Table 4), EE-SP 구간과 RP-EE 구간의 오른발 CoPy에서 유의한 차이가 나타났다(p < .001, p = .016).
|
|
|
|
0% |
5% |
10% |
Statistic (ES [95% CI]) |
p |
|
Fx |
SP |
Left |
0.041±0.012 |
0.034±0.016 |
0.041±0.015 |
1.012 (.112 [0.00, 1.00]) |
.386 |
|
Right |
-0.045±0.014 |
-0.043±0.01 |
0.047±0.016 |
.128 (.016 [0.00, 1.00]) |
.881 |
||
|
EE |
Left† |
0.038±0.017 |
0.047±0.019 |
0.05±0.014 |
5.556 (.309 [0.07, 1.00]) |
.062 |
|
|
Right |
-0.032±0.014b |
0.046±0.015 |
0.06±0.016b |
13.184 (.622 [0.31, 1.00]) |
<.001 |
||
|
RP |
Left |
0.039±0.014 |
0.033±0.015 |
0.033±0.016 |
.985 (.110 [0.00, 1.00]) |
.395 |
|
|
Right |
-0.042±0.013 |
-0.04±0.013 |
-0.042±0.013 |
.336 (.040 [0.00, 1.00]) |
.720 |
||
|
Fy |
SP |
Left |
-0.151±0.025 |
-0.15±0.027 |
-0.156±0.038 |
.521 (.061 [0.00, 1.00]) |
.491 |
|
Right |
0.141±0.034 |
0.14±0.026 |
0.143±0.037 |
.101 (.012 [0.00, 1.00]) |
.905 |
||
|
EE |
Left† |
-0.082±0.037 |
-0.089±0.041 |
-0.094±0.054 |
.667 (.037 [0.00, 1.00]) |
.717 |
|
|
Right |
0.085±0.041 |
0.088±0.043 |
0.099±0.06 |
.551 (.064 [0.00, 1.00]) |
.587 |
||
|
RP |
Left |
-0.125±0.033 |
-0.131±0.039 |
-0.142±0.039 |
1.075 (.118 [0.00, 1.00]) |
.365 |
|
|
Right |
0.121±0.028 |
0.121±0.031 |
0.14±0.037 |
3.005 (.273 [0.00, 1.00]) |
.078 |
||
|
Fz |
SP |
Left |
0.583±0.043b |
0.604±0.05c |
0.665±0.056bc |
15.791 (.664 [0.38, 1.00]) |
.002 |
|
Right |
0.428±0.044 |
0.442±0.05 |
0.428±0.05 |
.684 (.079 [0.00, 1.00]) |
.519 |
||
|
EE |
Left |
0.605±0.058ab |
0.668±0.042a |
0.694±0.072b |
11.400 (.588 [0.27, 1.00]) |
<.001 |
|
|
Right |
0.394±0.056 |
0.393±0.051 |
0.398±0.066 |
.027 (.003 [0.00, 1.00]) |
.973 |
||
|
RP |
Left |
0.6±0.03 |
0.64±0.06 |
0.638±0.056 |
2.516 (.239 [0.00, 1.00]) |
.112 |
|
|
Right |
0.415±0.037 |
0.415±0.066 |
0.457±0.057 |
2.759 (.256 [0.00, 1.00]) |
.093 |
||
|
Note. asignificant difference between 0% and 5%, bsignificant
difference between 0% and 10%, csignificant difference between 5%
and 10%. |
|||||||
|
|
|
|
0% |
5% |
10% |
Statistic (ES [95% CI]) |
p |
|
CoPx |
EE-SP |
Left† |
-0.016±0.026 |
-0.027±0.009 |
0.018±0.024 |
1.556
(.086 [0.00, 1.00]) |
.459 |
|
Right |
0.005±0.009 |
-0.002±0.01 |
-0.003±0.009 |
2.507
(.239 [0.00, 1.00]) |
.113 |
||
|
RP-EE |
Left |
0.014±0.025 |
0.022±0.015 |
0.025±0.015 |
.736
(.084) [0.00, 1.00] |
.495 |
|
|
Right |
-0.003±0.008 |
0.001±0.009 |
0.006±0.01 |
1.839
(.187 [0.00, 1.00]) |
.191 |
||
|
CoPy |
EE-SP |
Left |
-0.03±0.051 |
-0.058±0.028 |
-0.056±0.058 |
1.457
(.154 [0.00, 1.00]) |
.262 |
|
Right† |
0.007±0.006ab |
0.001±0.006a |
-0.002±0.008b |
14.889
(.827 [0.36, 1.00]) |
<.001 |
||
|
RP-EE |
Left |
0.017±0.05 |
0.046±0.042 |
0.062±0.062 |
1.645
(.171 [0.00, 1.00]) |
.224 |
|
|
Right† |
-0.006±0.005b |
-0.004±0.009c |
-0.001±0.008bc |
8.222
(.457 [0.16, 1.00]) |
.016 |
||
|
Note. asignificant difference between 0%
and 5%, bsignificant difference between 0% and 10%, csignificant
difference between 5% and 10%. EE-SP: push phase, RP-EE: pull phase. Values are presented as F
(partial η2). †indicates non-parametric analysis presented
as χ2 (Kendall's W) |
|||||||
관절 각도를 분석한 결과는 다음과 같다(Table 5). 발목 관절에서는 SP 시점의 왼발 각도가 통계적으로 유의한 차이가 나타났다(p = .019). 또한, EE 시점의 왼발과 오른발 각도 모두에서 유의한 차이가 나타났으나, 사후검정 결과 조건 간 유의한 차이는 확인되지 않았다. 무릎 관절에서는 EE 시점의 오른발 각도가 아쿠아백 관성 저항 변화에 따라 유의차가 나타났다(p < .001). 또한, SP 시점의 오른발 각도에서도 유의한 차이가 나타났으나, 사후검정 결과 조건 간 유의한 차이는 확인되지 않았다. 엉덩 관절에서는 관성 저항 조건에 따른 통계적으로 유의한 차이가 나타나지 않았으며, 관성 저항 증가에 따른 일관된 증가 또는 감소 패턴 역시 확인되지 않았다.
|
|
|
|
0% |
5% |
10% |
Statistic (ES [95% CI]) |
p |
|
Ankle |
SP |
Left |
82.18±4.15 |
84.22±2.82c |
81.11±4.04c |
5.170 (.393 [0.05, 1.00]) |
.019 |
|
Right |
139.4±32.65 |
147.39±34.19 |
135.42±24.45 |
2.657 (.249 [0.00, 1.00]) |
.101 |
||
|
EE |
Left |
84.14±3.48 |
83.63±4.01 |
79.76±4.92 |
5.385 (.402 [0.06, 1.00]) |
.016 |
|
|
Right |
159.33±30.13 |
154.59±27.31 |
144.58±16.13 |
3.681 (.315 [0.00, 1.00]) |
.048 |
||
|
RP |
Left |
79.21±2.89 |
80.82±2.21 |
79.92±3.1 |
1.063 (.117 [0.00, 1.00]) |
.369 |
|
|
Right |
146.43±34.69 |
154.59±33.67 |
137.34±26.88 |
2.356 (.227 [0.00, 1.00]) |
.127 |
||
|
Knee |
SP |
Left |
121.49±6.9 |
121.66±5.84 |
120.64±7.74 |
.257 (.031 [0.00, 1.00]) |
.776 |
|
Right |
200.1±10.46 |
198.69±15.86 |
206.2±11.67 |
4.948 (.382 [0.05, 1.00]) |
.021 |
||
|
EE |
Left |
126.75±9.2 |
124.03±7.2 |
125.14±7.45 |
1.740 (.179 [0.00, 1.00]) |
.207 |
|
|
Right |
190.24±12.44ab |
196.35±15.38a |
200.29±11.98b |
13.219 (.623 [0.32, 1.00]) |
<.001 |
||
|
RP |
Left |
119.44±6.55 |
120.75±5.19 |
121.96±6.12 |
1.246 (.135 [0.00, 1.00]) |
.314 |
|
|
Right† |
195.65±12.77 |
194.72±15.05 |
191.18±38.33 |
3.556 (.198 [0.00, 1.00]) |
.169 |
||
|
Hip |
SP |
Left |
130.2±6.42 |
147.78±10.66 |
128.81±8.7 |
.433 (.051 [0.00, 1.00]) |
.581 |
|
Right |
164.17±5.86 |
160.88±4.63 |
166.74±6.35 |
1.134 (.124 [0.00, 1.00]) |
.318 |
||
|
EE |
Left |
129.41±10.94 |
146.88±8.92 |
129.22±9.19 |
.332 (.013 [0.00, 1.00]) |
.754 |
|
|
Right |
165.48±6.64 |
163.63±4.97 |
165.12±6.47 |
1.515 (.159 [0.00, 1.00]) |
.250 |
||
|
RP |
Left |
130.22±8.72 |
147.68±9.47 |
129.49±8.46 |
.453 (.054 [0.00, 1.00]) |
.644 |
|
|
Right |
165.34±5.81 |
162.95±5.39 |
166.05±6.28 |
.407 (.048 [0.00, 1.00]) |
.672 |
||
|
Note. asignificant difference between 0% and 5%, bsignificant
difference between 0% and 10%, csignificant difference between 5%
and 10%. SP: setup position, EE: maximum elbow extension, RP: return
position. Values are presented as F (partial η2). †indicates
non-parametric analysis presented as χ2
(Kendall's W) |
|||||||
본 연구는 아쿠아백을 활용한 관성 저항 증가에 따라 태권도 선수의 런지 자세 회전 동작 시 관성 저항 변화에 따른 운동학적 및 운동역학적 특성을 분석하여 아쿠아백 트레이닝의 적용 가능성을 검토하고 태권도 선수의 기능성 트레이닝을 위한 기초 자료를 제시하고자 하였다. 이를 위해 관성 저항 변화는 아쿠아백을 활용하여 피험자 체중의 0%, 5%, 10% 무게로 조절하여 동작을 수행하여 분석하였다.
본 연구에서는 관성 저항 증가에 따라 push phase에서는 전경골근의 평균 및 최대 적분근전도가 유의하게 증가하였으며, pull phase에서는 대퇴직근, 대퇴이두근, 비복근 및 전경골근에서 유의하게 증가하였다. 반면, 복직근, 외복사근, 척추기립근, 중둔근에서는 관성 저항 조건에 따른 통계적 유의차가 나타나지 않았다. 이러한 결과는 아쿠아백의 불규칙한 움직임에 대한 조절 반응이 체간보다는 하지 근육 중심으로 나타났을 가능성을 시사한다. Horak (2006)은 외적 환경 변화 상황에서 자세 조절은 감각-운동계의 상호작용을 기반으로 수행되며, 과도한 자세 변화보다는 안정적인 균형 유지 전략이 우선적으로 나타날 수 있다고 보고하였다. 본 연구에서도 태권도 선수들은 아쿠아백의 불규칙한 관성 저항 상황에서 체간 움직임을 크게 변화시키기보다는 하지 근육 활성 증가를 통해 자세를 조절한 것으로 판단된다. 특히 런지 동작은 체중 지지와 체중 이동이 동시에 수행되는 동작으로, 하지 근육은 무릎 및 발목 관절의 안정적인 지지와 추진력 생성에 중요한 역할을 수행한다. Winter (2009)는 대퇴 및 하퇴 근육이 체중 이동과 균형 유지 과정에서 주요한 역할을 수행한다고 보고하였으며, 본 연구에서도 대퇴직근, 대퇴이두근, 비복근 및 전경골근의 활성 증가가 이러한 하지 중심의 조절 요구와 관련된 결과로 나타난 것으로 해석된다.
체간 근육에서는 관성 저항 조건에 따른 유의한 차이가 나타나지 않았다. 이러한 결과는 기존의 아쿠아백 연구와 비교할 때 실험 조건의 차이와 관련이 있을 가능성이 있다. 기존 선행연구들은 바벨과 같은 고정 부하(stable load)와 아쿠아백과 같은 불안정 부하(unstable load)를 비교하여 체간 근육 활성 증가를 보고하였다(Anderson & Behm, 2005; Calatayud et al., 2015; Glass & Albert, 2018). 즉, 안정적인 도구와 불규칙한 물의 움직임이 발생하는 도구 간의 차이가 체간 안정화 근육의 추가적인 활성 요구를 유발한 것이다. 반면, 본 연구에서는 모든 조건에서 동일하게 아쿠아백을 사용한 상태에서 관성 저항 수준(0%, 5%, 10%)만을 조절하였다. 따라서 모든 조건에서 불규칙한 물의 움직임에 따른 instability 자극이 기본적으로 존재하였다. Park과 Kim (2021)은 아쿠아백 트레이닝이 태권도 선수의 발목과 무릎 관절 안정화에 긍정적인 영향을 미쳤다고 보고하였다. 이는 아쿠아백의 불규칙한 움직임에 대한 조절 반응이 체간보다는 하지 분절 중심으로 나타날 수 있음을 시사한다. 이러한 이유로 관성 저항 수준 증가에 따른 추가적인 체간 근활성도 변화는 제한적으로 나타났지만, 체중 지지 및 힘 조절 역할을 수행하는 하지 근육에서 상대적으로 뚜렷한 활성 증가 양상이 나타난 것으로 판단된다.
지면반력 분석 결과에서는 Fz 방향의 시점 SP와 EE 왼발 지면반력 값이 관성 저항이 증가함에 따라 유의하게 증가하였다. 이는 런지 동작에서 앞발이 주요 지지 및 충격 흡수 역할을 수행하기 때문으로 판단된다(Winter, 2009). 반면, Fy 방향에서는 조건 간 유의한 차이가 나타나지 않았는데, 이는 런지 자세 회전 동작이 전후 방향의 추진력 생성보다는 자세 유지 및 회전 조절 중심의 동작 특성을 반영한 결과로 판단된다. 또한, Fx 방향에서는 시점 EE의 오른발 지면반력 값이 관성 저항에 유의하게 증가하였다. 이는 관성 저항 증가 상황에서 회전 동작 수행을 위한 수평 방향 힘 생성 요구가 증가했음을 의미한다. 런지 동작에서 뒤쪽 발은 추진력 생성에 중요한 역할을 하며(Dai, Mao, Garrett & Yu, 2015), 본 연구에서도 이러한 하지 중심의 힘 조절 양상이 부분적으로 확인되었다. 이러한 지면반력 증가 양상은 하지 근육 활성 증가 결과와도 유사한 경향을 나타내며, 관성 저항 증가 시 하지 중심의 부하 조절 요구가 증가했음을 시사한다.
압력중심 변위는 EE-SP 구간과 RP-EE 구간의 오른발 CoPy 값에서 유의한 차이가 나타났다. 그러나 전체적인 압력중심 변위의 변화는 제한적으로 나타났으며, 이는 관성 저항 증가 상황에서도 선수들이 기존의 균형 조절 패턴을 크게 변화시키지 않은 상태에서 동작을 수행하였음을 의미한다. Horak (2006)은 숙련된 운동 선수의 경우 외적 부하 변화 상황에서도 압력중심 변위를 최소화하는 전략을 사용한다고 보고하였으며, 본 연구 결과 역시 이와 유사한 경향을 나타냈다. 즉, 태권도 선수들은 아쿠아백의 불규칙한 관성 저항 상황에서도 과도한 자세 변화 없이 하지 근육 활성 및 지면반력 변화와 함께 동작이 수행된 것으로 판단된다.
관절 각도 분석 결과에서는 발목 및 무릎 관절 변수에서 유의한 차이가 나타났으나, 일부 변수는 사후검정에서 조건 간 차이가 확인되지 않았다. 또한, 유의한 차이가 나타난 변수에서도 관성 저항 증가에 따른 일관된 증가 또는 감소 패턴은 확인되지 않았다. 이러한 결과는 관성 저항 증가 상황에서도 전체적인 운동학적 패턴은 비교적 일정하게 유지되었음을 의미한다(Latash, 2012). 특히 근활성도 및 지면반력 변화가 함께 나타난 것으로 확인되었다. 반면, 관절 각도의 변화는 제한적으로 나타났다는 점에서 관성 저항 증가 상황에서도 운동 패턴 자체의 변화는 크지 않았던 것으로 판단된다. 또한, 런지 자세 회전 동작에서 상체 회전력을 하체로 전달하는 데 중요한 역할을 하는 엉덩 관절의 각도 변화 역시 함께 확인하였으나, 관성 저항 조건에 따른 유의한 차이는 나타나지 않았다. 이러한 결과는 관성 저항 증가 상황에서 하지 및 체간의 전체적인 운동학적 패턴이 비교적 일정하게 유지되었음을 시사하며, 태권도 선수들은 엉덩 관절 중심의 운동학적 변화보다는 발목 및 무릎 관절을 중심으로 한 원위부(distal) 조절 전략과 하지 근활성도 및 지면반력 조절을 통해 하지 중심의 조절 전략에 대응한 것으로 판단된다.
이상의 결과를 종합하면, 아쿠아백을 활용한 관성 저항 증가는 체간 근육보다는 하지 근육 및 지면반력 변수에서 상대적으로 뚜렷한 변화가 나타났다. 특히 태권도 선수들은 관절 운동학적 패턴의 큰 변화 없이 하지 근활성도와 지면반력 조절을 통해 불규칙한 관성 저항에 대응한 것으로 판단되며, 특히 관성 저항 수준 증가에 따라 하지 중심의 신경근 반응 및 부하 조절 양상이 상대적으로 증가하는 경향이 나타났다. 이러한 결과는 아쿠아백의 관성 조절은 저항 수준에 따라 하지 중심의 신경근 반응 및 부하 조절 특성을 유도하는 훈련 도구로 활용될 가능성을 제시한다. 또한, 후속 연구에서는 아쿠아백의 형태 및 동작 수행 시 도구의 위치 변화에 따른 운동학적 및 운동역학적 차이를 비교·분석함으로써, 아쿠아백 트레이닝의 적용 범위와 특성을 보다 구체적으로 규명할 필요가 있다.
본 연구는 아쿠아백을 활용한 관성 저항 변화에 따라 태권도 선수의 런지 자세 회전 동작 시 운동학적 및 운동역학적 특성을 분석하여 아쿠아백 트레이닝의 적용 가능성을 검토하고 기능성 트레이닝을 위한 기초 자료를 제시하고자 하였다. 연구 결과, 관성 저항 증가에 따라 push phase에서는 전경골근의 평균 및 최대 적분근전도가 유의하게 증가하였으며, pull phase에서는 대퇴직근, 대퇴이두근, 비복근 및 전경골근에서 유의한 활성 증가가 나타났다. 또한, 일부 지면반력 변수에서도 관성 저항 증가에 따른 유의한 변화가 확인되었다. 반면, 체간 근육과 관절 각도 변수에서는 제한적인 변화 양상이 나타났다.
이러한 결과는 아쿠아백의 불규칙한 관성 저항 상황에서 체간보다는 하지 중심의 신경근 반응 및 부하 조절 특성이 나타날 가능성을 시사한다. 특히 태권도 선수들은 관절 운동학 패턴의 큰 변화 없이 하지 근활성도와 지면반력 반응을 중심으로 동작을 수행한 것으로 판단된다. 따라서 아쿠아백을 활용한 관성 저항 조절은 태권도 선수의 기능성 트레이닝을 위한 보조적 훈련 도구로 활용될 가능성이 있을 것으로 사료된다. 후속 연구에서는 아쿠아백의 형태 및 위치 변화에 따른 운동학적 및 운동역학적 특성을 추가적으로 비교·분석할 필요가 있다.
References
1. Abdel-Aziz, Y. & Karara, H. M. (1971). Direct linear trans- formation from comparator coordinates in object-space coordinates in close range photogrammetry. Proceedings of the ASP Symposium of Close-Range Photogrammetry. Urbana: University of Illinois.
Google Scholar
2. Anderson, K. & Behm, D. G. (2005). Trunk muscle activity in- creases with unstable squat movements. Canadian Journal of Applied Physiology, 30(1), 33-45.
Google Scholar
3. Behm, D. G. & Anderson, K. G. (2006). The role of instability with resistance training. Journal of Strength and Condi- tioning Research, 20(3), 716-722.
Google Scholar
4. Behm, D. G. & Colado, J. C. (2012). The effectiveness of resistance training using unstable surfaces and devices for rehabilitation. International Journal of Sports Physical Therapy, 7(2), 226-241.
Google Scholar
5. Calatayud, J., Colado, J. C., Martin, F., Casana, J., Jakobsen, M. D. & Andersen, L. L. (2015). Core muscle activity during the clean and jerk lift with barbell versus sandbags and water bags. International Journal of Sports Physical Therapy, 10(6), 803.
Google Scholar
6. Choi, C. S. (2013). Biomechanical characteristics and effects of the axial pre-rotational movement of the pelvis for the jireugi in the taekwondo juchumseogi stance. Korean Journal of Sport Science, 24(3), 465-476.
7. Cole, M. H. & Grimshaw, P. N. (2016). The biomechanics of the modern golf swing: Implications for lower back injuries. Sports Medicine, 46(3), 339-351.
Google Scholar
8. Dai, B., Mao, M., Garrett, W. E. & Yu, B. (2015). Biomechanical characteristics of an anterior cruciate ligament injury in javelin throwing. Journal of Sports and Health Science, 4(4), 333-340.
Google Scholar
9. Ditroilo, M., O'Sullivan, R., Harnan, B., Crossey, A., Gillmor, B., Dardis, W. & Grainger, A. (2018). Water-filled training tubes increase core muscle activation and somatosensory con- trol of balance during squat. Journal of Sports Sciences, 36(17), 2002-2008.
Google Scholar
10. Donovan, L., Hart, J. M., Saliba, S. A., Park, J., Feger, M. A., Herb, C. C. & Hertel, J. (2016). Rehabilitation for chronic ankle instability with or without destabilization devices: A randomized controlled trial. Journal of Athletic Training, 51(3), 233-251.
Google Scholar
11. Estevan, I., Falco, C., Silvernail, J. F. & Jandacka, D. (2015). Comparison of lower limb segments kinematics in a Taekwondo kick. An approach to the proximal to distal motion. Journal of Human Kinetics, 47, 41-49.
Google Scholar
12. Falco, C., Alvarez, O., Castillo, I., Estevan, I., Martos, J., Mugarra, F. & Iradi, A. (2009). Influence of the distance in a round- house kick's execution time and impact force in taekwondo. Journal of Biomechanics, 42(3), 242-248.
Google Scholar
13. Falco, C., Estevan, I. & Vieten, M. (2011). Kinematic analysis of five different kicks in taekwondo. Portuguese Proceedings of the 29th International Conference on Biomechanics in Sports, 219-222.
Google Scholar
14. Glass, S. C. & Albert, R. W. (2018). Compensatory muscle activation during unstable overhead squat using a water-filled training tube. The Journal of Strength and Condi- tioning Research, 32(5), 1230-1237.
Google Scholar
15. Horak, F. B. (2006). Postural orientation and equilibrium: What do we need to know about neural control of balance to prevent falls?. Age and Ageing, 35(Suppl. 2), ii7-ii11.
Google Scholar
16. Hume, P. A., Keogh, J. & Reid, D. (2005). The role of bio- mechanics in maximising distance and accuracy of golf shots. Sports Medicine, 35(5), 429-449.
Google Scholar
17. Jeong, J. Y. & Hong, S. M. (2018). A study on the necessity of functional training for improving athletes' performance and prevention injuries. Korean Society for Wellness, 13(1), 407-417.
18. Jung, T. W. & Park, H. J. (2022). Contributions of body seg- ments to the toe velocity during taekwondo roundhouse kick. Applied Sciences, 12(15), 7928.
Google Scholar
19. Kang, S. H., Lee, J. Y. & Park, I. B. (2023). The emg analysis study according to weight and water bag vest during push movement in badminton players. Journal of Con- verging Sport and Exercise Sciences, 21(3), 229-239.
20. Kibler, W. B., Press, J. & Sciascia, A. (2006). The role of core stability in athletic function. Sports Medicine, 36(3), 189-198.
Google Scholar
21. Kuntze, G., Mansfield, N. & Sellers, W. (2010). A biomechanical analysis of common lunge tasks in badminton. Journal of Sports Sciences, 28(2), 183-191.
Google Scholar
22. Latash, M. L. (2012). Fundamentals of motor control. Academic Press.
Google Scholar
23. Merletti, R. & Cerone, G. L. (2020). Tutorial. Surface emg detection, conditioning and pre-processing: Best practices. Journal of Electromyography and Kinesiology, 54, 102440.
Google Scholar
24. Park, J. M. & Kim, J. S. (2021). Effects of water bag exercise on low segment stabilization and kick power and speed in middle and high school taekwondo players. The Korea Journal of Sports Science, 30(1), 841-851.
25. Park, S. J. & Kim, S. H. (2023). Effect of water bag training used terrasensa on truncus isokinetic muscular function, muscular activity and balance ability in taekwondo player. Journal of Martial Arts, 17(4), 245-265.
26. Pieter, F. & Pieter, W. (1995). Speed and force in selected taekwondo techniques. Biology of Sport, 12(4), 257-266.
Google Scholar
27. U. S. Department of Health and Human Services (1993). Selected topics in surface electromyography for use in the occupational setting: Expert perspectives (DHHS Publi- cation No. 91-100). Washington, DC: U.S. Government Printing Office.s
28. Wezenbeek, E., Verhaeghe, L., Laveyne, K., Ravelingien, L., Witvrouw, E. & Schuermans, J. (2022). The effect of aquabag use on muscle activation in functional strength training. Journal of Sport Rehabilitation, 31(4), 420-427.
Google Scholar
29. Winter, D. A. (2009). Biomechanics and motor control of human movement. John Wiley and Sons.
Google Scholar
