Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Si-Hyun Yoo
http://dx.doi.org/10.5103/KJSB.2016.26.3.273 Epub 2016 October 15
Abstract
Objective: The purpose of this study was to investigate effects of upper limb, trunk, and pelvis kinematic variables on the velocity of Apkubi Momtong Baro Jireugi in Taekwondo.
Method: Twenty Taekwondo Poomsae athletes (age: 20.8±2.2 years, height: 171.5±7.0 cm, body weight: 66.2 ±8.0 kg) participated in this study. The variables were upper limb velocity and acceleration; trunk angle, angular velocity, and angular acceleration; pelvis angle, angular velocity, and angular acceleration; and waist angle, angular velocity, and angular acceleration. Pearson's correlation coefficient was calculated for Jireugi velocity and kinematic variables; multiple regression analysis was performed to investigate influence on Jireugi velocity.
Results: Angular trunk acceleration and linear upper arm punching acceleration had significant effects on Jireugi velocity (p<.05).
Conclusion: We affirmed that angular trunk acceleration and linear upper arm punching acceleration increase the Jireugi velocity.
Keywords
Taekwondo Jireugi Trunk Upper arm Velocity Acceleration
Jireugi, the most basic Taekwondo hand technique, uses rotational force generated by the body to stretch the arm rapidly and strike a target with the fist (Kukkiwon, 2006). In this technique's ready stance, the punching fist is positioned on the iliac spine with the dorsum facing downward and the shoulders wide open. The pulling fist is drawn back with the dorsum facing upward, and directed toward the target. While keeping the axillary fossa closed, the punching arm is rapidly pulled in a straight line using the rotational force of the waist. The punching fist is bent inward, so the dorsum faces upward before hitting the target (Korea Taekwondo Association [KTA], 2015; Kukkiwon, 2006).
A variety of studies have been conducted on Jireugi. A paper by Choi (2004) comparing the impact forces of different Jireugi types and target distances reported that maximum impact force and velocity are reached at 80% of the target distance, and claimed that bending the forearm increases the Jireugi impact force. Park (2007) and Kang, Kim, Shin, Kim, and Kim (2007) reported that Jiruegi using the lower extremities created the highest maximum punching velocity, and was therefore the most effective Jireugi method. They suggested that bending the knee on the same side as the punching fist creates an external force that is trans- mitted to the core of the body by the reciprocal action of the waist, followed by the shoulders, upper arms, forearms, and fists.
Ahn et al. (2008, 2012) analyzed the kinematic differences between Kkeuno-jireugi and Miro-jireugi. The greatest impact force was observed in Kkeuno-jireugi, while the greatest fist velocity was observed in Miro-jireugi. These papers claimed that when a Miro-jireugi force is applied for a prolonged period, the punch reaches its maximum speed relatively late. An additional study by Yoo (2015b) demonstrated a significant association between Jireugi punching speed and the pulling and pun- ching movements of the arms. Kinematic studies have also been con- ducted on Jireugi, such as those by Park et al. (2008) and Lee & Park (2015). This Taekwondo Jiruegi technique is a representative example of open kinetic chain exercises, in which the maximum velocity moves sequentially from the proximal segment to the distal segment (Putnam, 1991, 1993; Steindler, 1977; Yoo, 2015a, 2015b; Yoo, Jung & Ryu, 2016).
A variety of research is currently being conducted relating the maxi- mum velocity and impact force of the fist to movements of the trunk, pelvis, and waist. Lee, Kim, and Lee (2010) claimed that back extensor strength positively affects the punching speed of Jireugi. Choi (2013a, 2013b, 2013c), and Choi, Chung, and Shin (2014) reported pelvic coun- termovement before Jiruegi delivery, during which the pelvis turns in the punching direction, and termed this "Stretch Shortening Cycle" (SSC). They claimed that this countermovement contributes to successful ex- ecution of Jireugi. A study compared two groups, one with axial pre-rotation of the pelvis and the other without, and noted twice as much power and work around the waist in the pre-rotational group as the non-pre-rotational group (Choi et al., 2014). Measurement of the angles between the pelvis and trunk with analysis of coordination and con- sistency of angular velocity patterns found that the pre-rotational group had a more dynamic pattern. The paper claimed that this spring coord- ination pattern of the waist's medial-lateral axis was related to accumu- lation of elastic energy in the muscles around the waist. As these studies suggest, trunk, pelvis, and waist movements play a very important role in Taekwondo Jireugi delivery.
Most of the precedent studies described above analyzed kinematic differences between elite athletes, who know how to use the trunk, pelvis, and waist effectively, and non-elite athletes, and claimed that the strength and movement of waist muscles positively affect the velocity, force, and power of Jiruegi. They did not investigate the direct influence of waist movement on the velocity, force, and power of Jiruegi, and a direct correlation is difficult to identify based on comparative analysis results. A multiple regression analysis is necessary to study the relation- ship between trunk, pelvis, and waist movements and Jireugi velocity, force, and power.
The Jireugi techniques in the previous studies were mostly performed in a Juchumseogi stance. Taekwondo Juchumseo Jireugi is a basic move- ment designed for training, rather than attacking. One may train with the kinematic factors of Taekwondo through repeated practice of Juchumseo Jireugi movements (Park et al., 2008). Because Juchumseogi Jireugi cannot deliver much force or power, analyzing its velocity, force, and power may be unreasonable. Juchumseo jireugi was not performed in these studies of Official Poomsae Taekwondo hand techniques. Jireugi was performed in an anterior-posterior stance during board breaking, and Jireugi attacks were made in an anterior-posterior fighting stance during battles, (Yoo, 2015a, 2015b; Yoo et al., 2016). According to Tae- kwondo Poomsae competition rules (KTA, 2015), Jireugi is defined as striking with the fist, with one foot placed forward and one foot placed back. Jireugi carries its original value when performed in an Apkubi or Apseogi stance. It is most appropriate to study the velocity, force, and power of Jireugi in an Apkubseogi or Apseogi stance.
This study analyzed kinematic factors of the upper limbs, trunk, pelvis, and waist, and investigated their influence on maximum Jireugi velocity.
1. Subjects
Twenty Taekwondo Poomsae athletes from K University who com- peted in the National Taekwondo Poomsae Championships between 2014 and 2015 were recruited for this study (16 male athletes, 4 female athletes; mean age 20.8±2.2 years; mean height 171.5±7.0 cm; mean body mass 66.2±8.0 kg).
2. Procedure
Abkubi Momtong Baro Jireugi was analyzed in this investigation of the influence of kinematic factors of the trunk, pelvis, and waist on the velocity of Jireugi. Reflective markers were attached to the centers of joints and segment surfaces. Each participant performed five Abkubi Momtong Baro Jireugi movements. Eight infrared cameras (Oqus 300, Qualisys, Sweden) filmed the movements at 200 Hz.
3. Data analysis
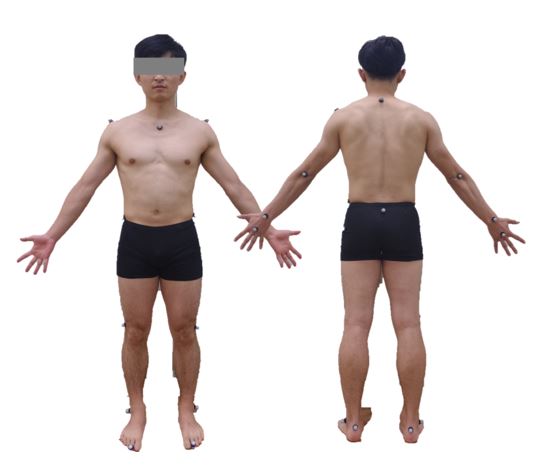
Qualisys Track Manager software (Qualisys, Sweden) and Matlab R2014b software (The Mathworks, USA) were used for biomechanical analysis of Abkubi Momtong Baro Jireugi. Three out of the five move- ments filmed were analyzed. As shown in Figure 1, twenty-one reflective markers were attached to the centers of the upper limbs and on the surfaces of segments (7th cervical vertebra, sternum manubrium, left and right acromion processes, left and right humerus lateral epicondyles, left and right ulnar styloid processes, left and right 3rd metacarpal bones, sacrum, left and right iliac crests, left and right greater trochanters, left and right femoral condyles, left and right malleoli, and left and right 2nd phalanges). Three-dimensional coordinates were obtained via non-linear transformation with smoothing by a Butterworth 2nd order low-pass filter. Fast Fourier transform of the fastest Jireugi fist positional values determined the cut-off frequency, and the Power Spectral Density (PSD) of the signals converted into frequencies was calculated. The cutoff frequency was set at 12 Hz at a 99.9% level of accumulated PSD.
4. Phases of Jireugi
The movement of Abkubi Momtong Baro Jireugi was divided into acceleration and deceleration phases for effective analysis, as seen in Figure 2 (Yoo, 2015b).
1) Acceleration phase (Phase1)
From the moment the fist starts moving in the direction of Jireugi (Event1) to the moment the fist reaches maximum velocity (Event2).
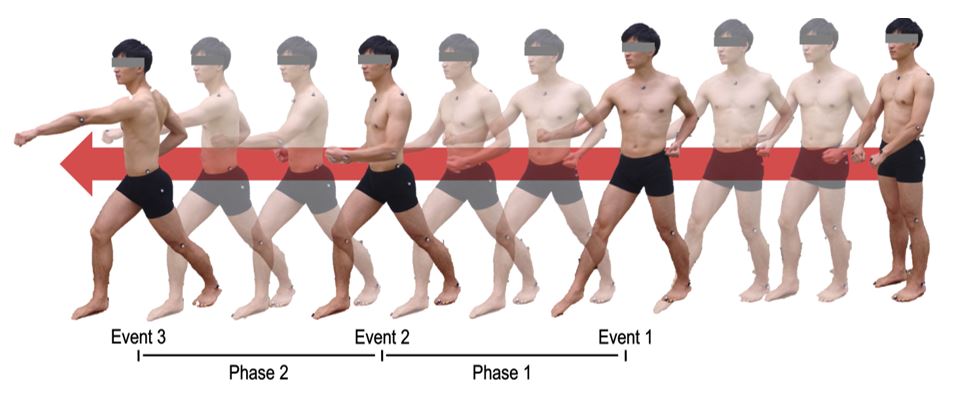
2) Deceleration phase (Phase2)
From the moment maximum velocity is reached (Event2), after which the fist decelerates, to the moment the fist has completely stopped (Event3).
5. Variables analysis
To investigate the influence of three-dimensional trunk, pelvis, and waist movements on Abkubi Momtong Baro Jireugi velocity, the 3-dimensional angles, angular velocities, and angular segment and joint accelerations were calculated (Hamill & Ryu, 2003; Winter, 2009; Yoo, 2015a; Yoo et al., 2016).
1) Linear velocity and linear acceleration of the upper limbs
Using the finite-difference technique, the linear velocity and acceler- ation were calculated by taking the derivative of the time function. The forward movement was set as (+), and backward movement, as (-).
2) Angular velocity and angular acceleration of the upper limbs
Angular velocity and acceleration were calculated by taking the deriva- tive of the time function. The forward movement was set as (+) and backward movement was set as (-).
3) 3-D segment angle
To obtain the local coordinates of the trunk and pelvis, the left-right axis was set as the x-axis, the anterior-posterior axis as the y-axis, and the vertical axis as the z-axis. The reflective marker coordinates were obtained with the participant in a stationary anatomical stance (ready stance) before performing Jireugi. These coordinate values were used to set the calibration unit vector that would represent the segments. The unit vector was calculated as the cross product following the right hand rule. The product of the calibration unit vector (CV) of each segment and the tracking unit vector (TV) calculated for each Jireugi performed was expressed as a 3x3 matrix, and the 3-dimensional segment angles were calculated as shown below (Yoo, 2015a; Yoo et al., 2016). X-axis rotation signified flexion and extension; y-axis rotation, left and right flexion; and z-axis rotation, left and right rotation. Counterclockwise direction was set as (+) and clockwise direction was set as (-).
4) 3-D angular velocity and angular acceleration
Since the axes of the trunk, pelvis, and waist change over time, it is difficult to use the derivative of time to calculate angular velocity and acceleration. They were calculated after changing the coordinates based on the rectangular coordinate system (Hamill & Ryu, 2003; Yoo, 2015a).
Where ωx, ωy, ωz = angular velocity for each direction, αx, αy, αz = angular acceleration for each direction, = angle about the x-axis, θ = Y angle about the y-axis, ψ= angle about the z-axis.
6. Statistical analysis
In this study, multiple regression analysis was performed to investigate the influence of trunk, pelvis, and waist kinematic factors on Taekwondo Jireugi velocity. The explanatory power (r2) of the kinematic factors and their relative importance (β) were assessed. A Pearson's correlation coef- ficient was calculated to study the correlation between kinematic factors and Jireugi velocity. Significantly correlated factors with Jireug velocity were selected as the independent variables in the multiple regression analysis. The level of significance was set at α=.05.
In this study, upper limb angular velocity and angular acceleration, and the 3-dimensional angles, angular velocity, and angular acceleration of the trunk, pelvis, and waist were calculated. Multiple regression analysis was performed to investigate their influence on Jireugi maximum velocity.
1. Phase durations
Time spent in each phase is shown in Table 1. P1 lasted 0.26±0.04 seconds, and P2 lasted 0.16±0.04 seconds.
|
Phase 1 |
Phase 2 |
|
|
Time (sec) |
0.26±0.04 |
0.16±0.04 |
|
% |
61.69±8.28 |
38.31±8.28 |
2. Peak segment velocity and acceleration
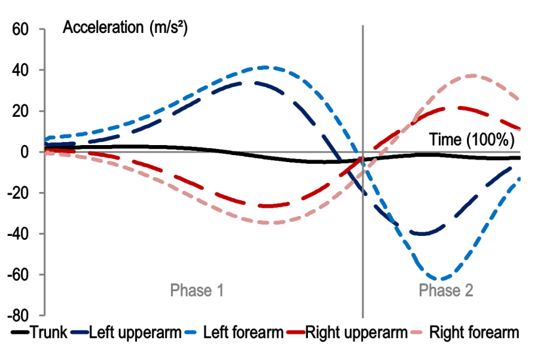
The peak velocities and accelerations of the upper arms and forearms are shown in Table 2. Forearm values were greatest, followed by those of the upper arms and trunk. The patterns of changes in velocity and acceleration are shown in Figures 3 and 4. The trunk reached peak velocity and acceleration first, followed by upper arms and forearms.
|
Segment |
Velocity (m/s) |
Acceleration (m/s2) |
|
Trunk |
0.95±0.12 |
3.49±1.06 |
|
Left upper arm |
4.20±0.49 |
36.82±7.58 |
|
Left forearm |
5.74±0.70 |
44.44±12.14 |
|
Right upper arm |
-2.17±0.47 |
-28.78±8.06 |
|
Right forearm |
-3.56±0.65 |
-40.72±10.17 |
|
Punching fist |
7.46±0.76 |
- |

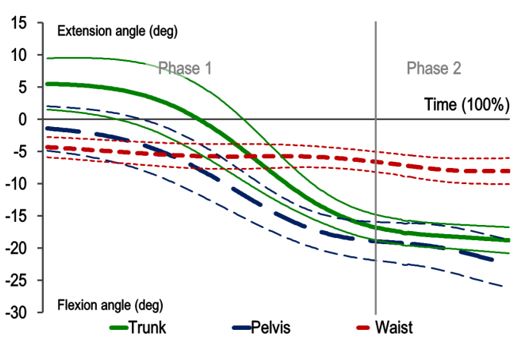
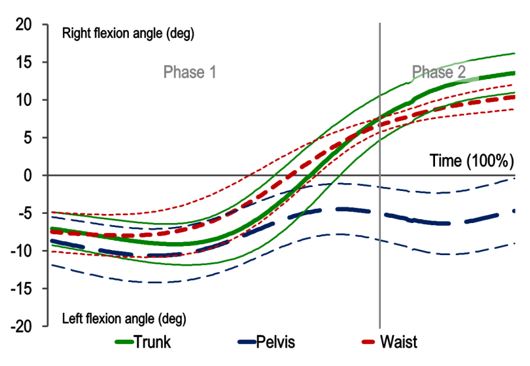
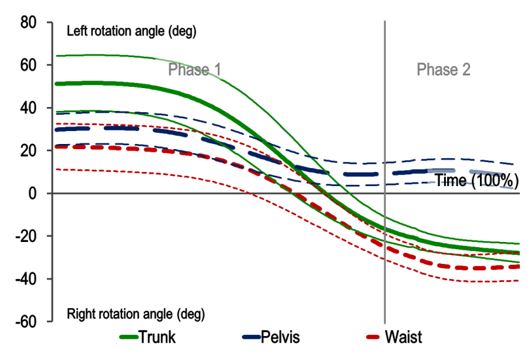
3. 3-D trunk, pelvis, and waist angles
The 3-dimensional angles of the trunk, pelvis, and waist are shown in Table 3 and Figures 5-7. For the trunk, the extension angle was 5.5±4.0°, left flexion angle was 5.5±4.0°, and left rotation angle was 51.1±13.1° relative to the ready stance at E1. During P1, the flexion angle was 23.2±4.2°, right flexion angle was 19.1±4.2°, and right rotation angle was 73.9±15.1°. During P2, the flexion angle was 1.9±0.8°, right flexion angle was 5.2±2.6°, and right rotation angle was 10.0±5.3°.
For the pelvis, the flexion angle was 1.4±3.4°, left flexion angle was 8.6±3.2°, and left rotation angle was 29.7±7.3° relative to the ready stance at E1. During P1, the flexion angle was 18.0±3.8°, right flexion angle was 7.8±4.2°, and right rotation angle was 23.7±8.9°. During P2, the flexion angle was 4.6±1.2°, right flexion angle was 3.0±1.4°, and right rotation angle was 5.3±2.2°.
For the waist, the flexion angle was 4.3±1.6°, left flexion angle was 7.5±2.6°, and left rotation angle was 21.9±10.7° relative to the ready stance at E1. During P1, the flexion angle was 3.2±1.3°, right flexion angle was 16.0±3.0°, and right rotation angle was 52.5±12.9°. During P2, the flexion angle was 1.3±0.8°, right flexion angle was 3.5±1.5°, and right rotation angle was 7.5±4.4°.
|
Axis |
Event 1 |
Event 2 |
Event 3 |
ROM at Phase 1 |
ROM at Phase 2 |
|
|
Trunk |
X |
5.5±4.0 |
-17.5±1.9 |
-19.3±2.2 |
-23.2±4.2 |
-1.85±0.80 |
|
Y |
-7.0±2.2 |
9.5±2.8 |
14.5±2.5 |
19.1±4.2 |
5.17±2.57 |
|
|
Z |
51.1±13.1 |
-20.6±4.7 |
-30.0±4.6 |
-73.2±15.1 |
-10.03±5.30 |
|
|
Pelvis |
X |
-1.4±3.4 |
-19.2±3.2 |
-23.8±3.34 |
-18.0±3.8 |
-4.64±1.16 |
|
Y |
-8.6±3.2 |
-5.7±3.7 |
-3.8±4.2 |
7.8±4.2 |
3.02±1.43 |
|
|
Z |
29.7±7.3 |
9.9±5.2 |
5.9±5.5 |
-23.7±9.0 |
-5.27±2.23 |
|
|
Waist |
X |
-4.3±1.6 |
-7.0±1.6 |
-8.0±2.2 |
-3.2±1.3 |
-1.33±0.80 |
|
Y |
-7.5±2.6 |
7.7±0.9 |
11.1±1.8 |
16.0±3.0 |
3.53±1.51 |
|
|
Z |
21.9±10.7 |
-29.6±5.8 |
-34.3±5.9 |
-52.5±12.4 |
-7.51±4.41 |
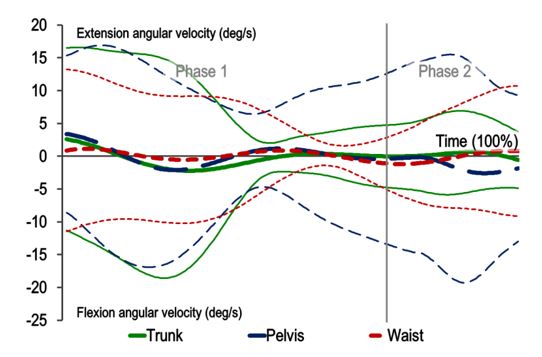
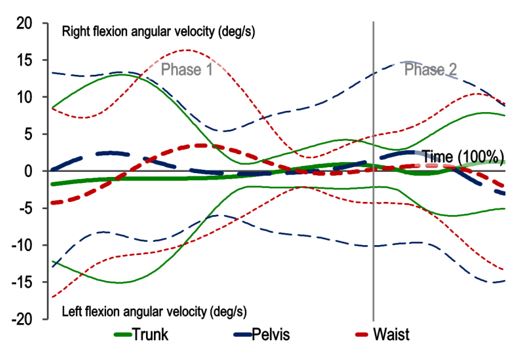
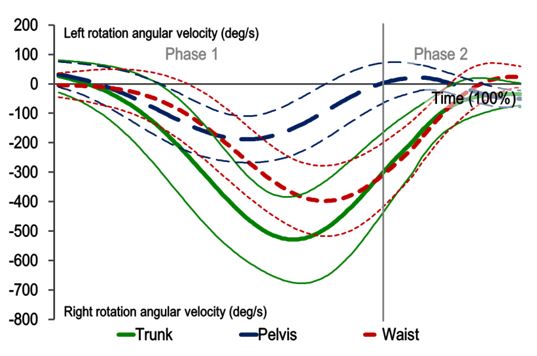
4. 3-D angular velocities of the trunk, pelvis, and waist
The angular velocities of the trunk, pelvis, and waist are shown in Table 4 and Figure 8-10. For the trunk, the left rotation velocity was 28.1±53.2°/s at E1, the right rotation velocity was 195.6±106.2°/s at E2 and 21.7±30.7°/s at E3. For the pelvis, the left rotation velocity was 33.9±42.1°/s at E1, 19.6±49.3°/s at E2, and 11.7±28.8°/s at E3. For the waist, the right rotation velocity was 4.2±39.6°/s at E1, 217.9±94.8°/s at E2, and 7.0±28.5°/s at E3.
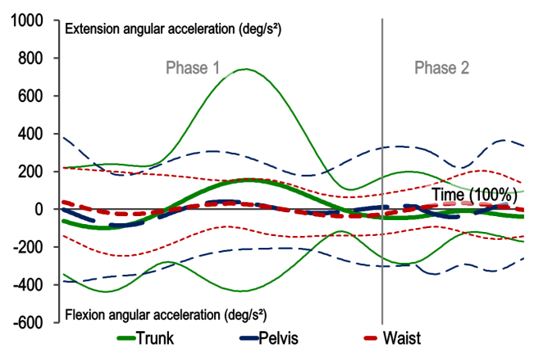
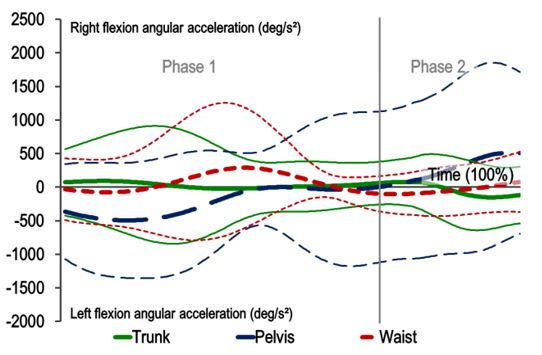
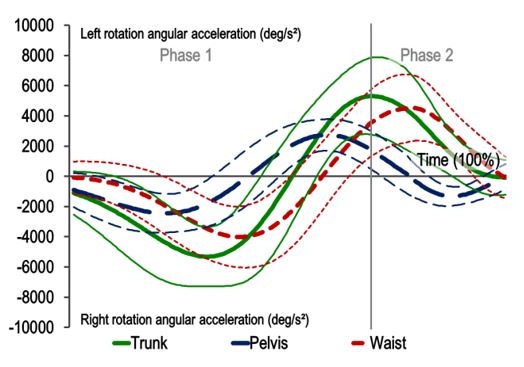
5. 3-D angular acceleration of the trunk, pelvis, and waist
The 3-dimensional angular accelerations of the trunk, pelvis, and waist are shown in Table 5 and Figure 11-13. For the trunk, the right rotation acceleration was 1061.5±1390.5°/s at E1, the left rotation acceleration was 4501.8±2682.8°/s at E2 and 412.2±650.3°/s at E3. For the pelvis, the right rotation acceleration was 853.0±1086.5°/s at E1, the left rotation acceleration was 235.9±1291.5°/s at E2 and 686.1±545.8°/s at E3. For the waist, the right rotation acceleration was 79.4±1053.3°/s at E1, left rotation acceleration was 4485.6±2264.3°/s at E2, and right rotation acceleration was 400.2±704.7°/s at E3.
|
Axis |
Event 1 |
Event 2 |
Event 3 |
Max at |
Min at |
Max at |
Min at |
|
|
Trunk |
X |
2.6±13.7 |
0.1±5.2 |
-2.4±5.5 |
12.5±10.0 |
-11.7±11.9 |
4.3±4.1 |
-6.0±4.4 |
|
Y |
-1.9±10.1 |
0.1±2.7 |
-0.7±5.3 |
7.9±8.6 |
-9.6±8.6 |
5.9±4.6 |
-5.4±3.9 |
|
|
Z |
28.1±53.2 |
-195.6±106.2 |
-21.7±30.7 |
34.9±42.6 |
-561.9±139.4 |
-5.4±3.9 |
-205.6±91.7 |
|
|
Pelvis |
X |
3.6±11.6 |
-0.2±14.5 |
-0.4±7.6 |
15.0±7.4 |
-15.3±12.0 |
3.0±28.3 |
-13.8±10.4 |
|
Y |
-0.1±13.5 |
2.4±12.2 |
-1.7±7.8 |
15.1±8.5 |
-12.1±6.2 |
-205.6±91.7 |
-11.2±8.8 |
|
|
Z |
33.9±42.1 |
19.6±49.3 |
-11.7±28.8 |
61.3±36.1 |
-212.5±76.8 |
11.2±8.7 |
-60.4±27.7 |
|
|
Waist |
X |
0.8±12.4 |
-1.1±5.6 |
0.4±6.5 |
9.2±8.7 |
-8.8±7.4 |
-13.8±10.4 |
-5.7±5.8 |
|
Y |
-4.3±13.0 |
0.5±4.9 |
-3.2±7.1 |
11.0±10.7 |
-10.8±8.7 |
9.3±9.0 |
-8.2±7.4 |
|
|
Z |
-4.2±39.6 |
-217.9±94.8 |
-7.0±28.5 |
15.0±48.8 |
-423.7±113.3 |
-11.2±8.8 |
-218.1±94.4 |
6. Correlation coefficient
The correlation coefficients between punching speed and kinematic variables are shown in Table 6. Punching speed was positively correlated with the linear velocity and acceleration of the upper arm (r=.766, p= 0.000, r=-.757, p=0.000) and forearm (r=0.723, p=0.000, r=-.564, p= 0.010) of the punching arm. It was negatively correlated with the linear velocity and acceleration of the upper arm (r=0.721, p=0.000, r=-.637, p=0.003) and forearm (r=0.640, p=0.003, r=-.551, p=0.012) of the pulling arm. Punching speed was positively correlated with the trunk rotation angle (r=.509, p=.022) at E1, and trunk rotation range (r=.585, p=.007) and waist left·right flexion range (r=.596, p=.006) during P1. Punching speed was negatively correlated with the waist left · right flexion angle (r=-.540, p=.014) at E1. Punching speed was negatively correlated with the rotation velocity of the trunk (r=-.547, p=.013) and waist (r=-.509, p=.022), as well as the rotation acceleration of the trunk (r=-.490, p=.022) during P1.
|
Axis |
Event 1 |
Event 2 |
Event 3 |
Max at |
Min at |
Max at |
Min at |
|
|
Trunk |
X |
-55.7±277.4 |
-42.1±239.4 |
-5.6±106.3 |
398.5±513.5 |
-349.9±200.2 |
131.4±84.0 |
-193.7±178.0 |
|
Y |
70.5±485.0 |
75.3±370.0 |
-49.0±485.5 |
637.0±483.8 |
-594.0±498.7 |
424.1±301.0 |
-482.2±408.2 |
|
|
Z |
-1061.5±1390.5 |
4501.8±2682.8 |
412.2±650.3 |
5992.1±2176.7 |
-6411.7±1975.7 |
4697.4±2376.8 |
-578.0±942.6 |
|
|
Pelvis |
X |
7.7±384.5 |
15.4±310.6 |
11.5±214.3 |
406.9±169.4 |
-430.9±186.6 |
356.4±199.1 |
-350.5±159.4 |
|
Y |
-349.6±689.8 |
99.8±1164.9 |
228.2±957.3 |
942.7±543.1 |
-1425.0±759.9 |
1207.5±901.0 |
-722.2±1052.8 |
|
|
Z |
-853.0±1086.5 |
235.9±1291.5 |
686.1±545.8 |
3121.0±1030.3 |
-3109.6±1142.0 |
1190.9±831.9 |
-1454.0±620.7 |
|
|
Waist |
X |
45.0±178.6 |
3.7±108.4 |
-6.6±131.0 |
194.0±134.1 |
-211.3±129.7 |
158.9±119.9 |
-155.7±108.9 |
|
Y |
-21.8±459.6 |
-94.6±320.7 |
58.0±429.0 |
671.5±746.5 |
-554.3±368.5 |
341.9±401.6 |
-363.0±284.5 |
|
|
Z |
-79.4±1053.3 |
4485.6±2264.3 |
-400.2±704.7 |
4826.3±2039.2 |
-4776.3±1856.3 |
4931.1±1924.7 |
-1096.5±704.2 |
7. Multiple regression analysis
Multiple regression analysis was performed to analyze the influence of the kinematic factors that significantly correlated with Taekwondo Jireugi on punching speed. The upper arm velocity and acceleration, and velocities, angular velocities, and angular acceleration of the trunk, pelvis, and waist were studied in the regression model. The multiple regression analysis of the influence of the linear velocity of the upper segments on the punching speed is shown in Table 7. The variance in- flation factor (VIF) is an indicator of multicollinearity, which is a basic condition of multiple regression analysis. If the VIF exceeds 10.0, multi- collinearity is deemed problematic. All of the independent variables, except for the left upper arm (punching arm), had VIFs less than 10.0, and did not have problematic multicollinearity. The coefficients of deter- mination, which describe the explanatory power of the independent variables were R2 = .646 and Durbin-Watson = 1.245, and were significant at F(4, 15) = 6.849, p=.002. The estimated multiple regression equation was: Punching speed= 0.556 × (Left upper arm) + 0.308 × (Left fore- arm) - 1.021 × (Right upper arm) + 0.375 × (Right forearm) + 2.473. The independent variables did not have a statistically significant influence on the punching speed.
The multiple regression analysis of upper segment linear accelerations on punching speed is shown in Table 8. All of the independent variables had VIFs of less than 10.0, and did not have problems of multicollinearity. The coefficient of determination R2 was .592 and Durbin-Watson statistic was 1.087, and they were statistically significant at F(4, 15) = 5.443, p=.007. The estimated multiple regression equation was: Punching speed = 0. 127 × (Left upper arm) - 0.014 × (Left forearm) + 0.005 × Table 8. Multiple regression analysis of punching speed using upper segments acceleration Independent variables Non-standardized coefficients Standardized coefficients (β) t p VIF B Standard error Left upper arm .127 .058 1.072 2.187 .045 8.835 Left forearm -.014 .023 -.186 -.612 .550 3.398 Right upper arm .005 .051 .040 .090 .929 7.360 Right forearm .015 .032 .161 .461 .651 4.500 (constant) 4.150 .794 5.228 .000 R2 = .592, Durbin-Watson = 1.087, F(4, 15) = 5.443, p=.007 Table 9. Multiple regression analysis of punching speed using trunk, pelvis, and waist angle Independent variables Non-standardized coefficients Standardized coefficients (β) t p VIF B Standard error Trunk rotation angle at E1 -.085 .065 -1.128 -1.310 .210 19.772 Trunk rotation ROM at P1 .062 .043 .943 1.430 .173 11.599 Waist left/right flexion angle at E1 -.183 .233 -.480 -.786 .444 9.937 Waist left/right flexion ROM at P1 .110 .152 .337 .726 .479 5.760 (constant) 4.175 1.328 3.145 .007 R2 = .437, Durbin-Watson = 1.458, F(4, 15) = 2.916, p=.057 (Right upper arm) + 0.015 × (Right forearm) + 4.150. The left upper arm (punching arm) (β=1.072, t=2.187, p=.045) had statistically signifi- cant influence on punching speed.
|
Kinematic variables |
Segment & joint |
Movement direction |
r |
p |
|
Linear velocity |
Trunk |
Anterior-posterior |
.141 |
.553 |
|
Left upper arm |
Anterior-posterior |
.766 |
.000 |
|
|
Left forearm |
Anterior-posterior |
.723 |
.000 |
|
|
Right upper arm |
Anterior-posterior |
-.721 |
.000 |
|
|
Right forearm |
Anterior-posterior |
-.630 |
.003 |
|
|
Linear acceleration |
Trunk |
Anterior-posterior |
-.092 |
.700 |
|
Left upper arm |
Anterior-posterior |
.757 |
.000 |
|
|
Left forearm |
Anterior-posterior |
.564 |
.010 |
|
|
Right upper arm |
Anterior-posterior |
-.637 |
.003 |
|
|
Right forearm |
Anterior-posterior |
-.551 |
.012 |
|
|
Angle |
Trunk |
Flexion & extension
angle |
.341 |
.141 |
|
Trunk |
Flexion & extension ROM |
.367 |
.112 |
|
|
Trunk |
Left & right flexion
angle |
-.014 |
.952 |
|
|
Trunk |
Left & right flexion
ROM |
.338 |
.145 |
|
|
Trunk |
Left & right rotation angle |
.509 |
.022 |
|
|
Trunk |
Left & right rotation ROM |
.585 |
.007 |
|
|
Pelvis |
Flexion & extension
angle |
.158 |
.505 |
|
|
Pelvis |
Flexion & extension ROM |
.207 |
.380 |
|
|
Pelvis |
Left & right flexion
angle |
-.172 |
.468 |
|
|
Pelvis |
Left & right flexion ROM |
.058 |
.809 |
|
|
Pelvis |
Left & right rotation
angle |
.376 |
.103 |
|
|
Pelvis |
Left & right rotation
ROM |
.382 |
.097 |
|
|
Waist |
Flexion & extension
angle |
-.277 |
.238 |
|
|
Waist |
Flexion & extension ROM |
-.437 |
.054 |
|
|
Waist |
Left & right flexion angle |
-.540 |
.014 |
|
|
Waist |
Left & right flexion ROM |
.596 |
.006 |
|
|
Waist |
Left & right rotation
angle |
.387 |
.092 |
|
|
Waist |
Left & right rotation
ROM |
.404 |
.078 |
|
|
Angular velocity |
Trunk |
Left & right rotation |
-.547 |
.013 |
|
Pelvis |
Left & right rotation |
-.235 |
.318 |
|
|
Waist |
Left & right rotation |
-.509 |
.022 |
|
|
Angular acceleration |
Trunk |
Left & right rotation |
-.490 |
.028 |
|
Pelvis |
Left & right rotation |
-.405 |
.077 |
|
|
Waist |
Left & right rotation |
-.390 |
.089 |
|
Independent variables |
Non-standardized
coefficients |
Standardized |
t |
p |
VIF |
|
|
B |
Standard error |
|||||
|
Left upper arm |
.556 |
.925 |
.299 |
.601 |
.557 |
10.467 |
|
Left forearm |
.308 |
.471 |
.263 |
.654 |
.523 |
6.839 |
|
Right upper arm |
-1.021 |
.680 |
-.549 |
-1.501 |
.154 |
5.663 |
|
Right forearm |
.375 |
.496 |
.266 |
.756 |
.462 |
5.251 |
|
(constant) |
2.473 |
1.375 |
|
1.799 |
.092 |
|
|
Independent variables |
Non-standardized
coefficients |
Standardized |
t |
p |
VIF |
|
|
B |
Standard error |
|||||
|
Left upper arm |
.556 |
.925 |
.299 |
.601 |
.557 |
10.467 |
|
Left forearm |
.308 |
.471 |
.263 |
.654 |
.523 |
6.839 |
|
Right upper arm |
-1.021 |
.680 |
-.549 |
-1.501 |
.154 |
5.663 |
|
Right forearm |
.375 |
.496 |
.266 |
.756 |
.462 |
5.251 |
|
(constant) |
2.473 |
1.375 |
|
1.799 |
.092 |
|
|
Independent variables |
Non-standardized
coefficients |
Standardized |
t |
p |
VIF |
|
|
B |
Standard error |
|||||
|
Left upper arm |
.556 |
.925 |
.299 |
.601 |
.557 |
10.467 |
|
Left forearm |
.308 |
.471 |
.263 |
.654 |
.523 |
6.839 |
|
Right upper arm |
-1.021 |
.680 |
-.549 |
-1.501 |
.154 |
5.663 |
|
Right forearm |
.375 |
.496 |
.266 |
.756 |
.462 |
5.251 |
|
(constant) |
2.473 |
1.375 |
|
1.799 |
.092 |
|
|
Independent variables |
Non-standardized
coefficients |
Standardized |
t |
p |
VIF |
|
|
B |
Standard error |
|||||
|
Minimum trunk rotation
angular velocity |
-.003 |
.002 |
-.391 |
-1.145 |
.268 |
2.876 |
|
Minimum waist rotation
angular velocity |
-.002 |
.003 |
-.193 |
-.566 |
.579 |
2.876 |
|
(constant) |
5.188 |
.840 |
|
6.180 |
.000 |
|
|
Independent variables |
Non-standardized coefficients |
Standardized |
t |
p |
VIF |
|
|
B |
Standard error |
|||||
|
Minimum trunk rotation angular acceleration |
.000 |
.000 |
-.490 |
-2.386 |
.028 |
1.000 |
|
(constant) |
5.885 |
.687 |
|
8.564 |
.000 |
|
The multiple regression analysis of the influence of the angles and motion ranges of the trunk, pelvis and waist on punching speed is shown in Table 9. Among the independent variables, the trunk rotation angle and trunk rotation ROM had VIFs greater than 10.0, and had problems of multicollinearity. The waist left/right flexion angle and waist left/right flexion ROM had VIFs less than 10.0, and did not have problems of multicollinearity. The coefficient of determination R2 was .437 and Durbin-Watson statistic was 1.458; they were not statistically signifi- cant at F(4, 15) = 2.916, p=.057.
The multiple regression analysis of the influence of the angular velocities of the trunk, pelvis, and waist on punching speed is shown in Table 10. All the independent variables had VIFs less than 10.0, and did not have any problems of multicollinearity. The coefficient of deter- mination R2 was .312 and Durbin-Watson statistic was 1.701, and they were statistically significant at F(2, 17) = 3.852, p=.042. The estimated multiple regression equation was: Punching speed = -0.003 × (Min- imum trunk rotation angular velocity) - 0.002 × (Minimum waist rota- tion angular velocity) + 5.188. None of the independent variables had statistically significant influences on the punch variables.
The multiple regression analysis of the influence of the angular acceleration of the trunk, pelvis, and waist on punching speed is shown in Table 11. All the independent variables had VIFs less than 10.0, and did not have any problems of multicollinearity. The coefficient of deter- mination R2 was .240 and Durbin-Watson statistic was 1.384, and they were statistically significant at F(1, 18) = 5.695, p=.028. The estimated multiple regression equation was: Punching speed = 0.000 × (Minimum trunk rotation angular acceleration) + 5.885. The minimum trunk rotation angular acceleration (β=-.490, t=-2.386, p=.028) had statistically sig- nificant influence on the punching speed.
This study investigated the influence of 3-dimensional trunk, pelvis, and waist movements on the maximum Jireugi velocity. The angles, angular velocities, and angular accelerations of the trunk, pelvis, and waist were calculated, and multiple regression analysis was performed to study their correlation with Jireugi speed.
P1, which terminates at the moment maximum punching speed is reached, lasted 0.26±0.04 seconds (61.69±8.28% of the total time), and P2 lasted 0.16±0.04 seconds (38.31±8.28% of the total time). In a study by Ahn (2012), the maximum punching speed was reached at 69.14% of the total time mark by Kkeunoh-jireugi, and at 76.66% by Miro-jireugi. In a biomechanical analysis of Apkubi Momtong Baro Jireugi (Yoo, 2015b), the maximum punching speed was reached at 57.24% of the total time. Compared to these results, the maximum punching speed in this study was reached relatively late. While the maximum speed of distal segments is usually reached at 80% of the total time in typical open kinetic chains, the maximum punching speed in this study was reached relatively earlier. This is attributed to abrupt halting of the hand movement with accurate position and timing, which is characteristic of Taekwondo hand techniques (Yoo, 2015a; Yoo 2015b), as well as the linear acceleration of the upper limbs in the direction opposite their movement after reaching maximum punching speed.
The maximum punching speed of 7.46 m/s in this study was higher than those found by Choi (2004), Kang, Kim, Shin, Kim, and Kim (2007), and Ahn (2012): 4.9 m/s, 5.99 m/s and 6.5 m/s, respectively. This may be due to the fact that Jireugi was performed for a short distance in a Juchumseogi stance in these studies, whereas it was performed in an Apkubi stance in this study.
The linear acceleration of the segments was greatest in the forearms, followed by upper arms and trunk. Maximum velocity and acceleration were reached first in the trunk, then upper arms and forearms. This result is consistent with a kinematic analysis of Jireugi by Yoo (2015b). It appears that the maximum acceleration moves sequentially from the proximal segments to the distal segments (Putnam, 1991, 1993; Steindler 1977; Yoo, 2015a, 2015b; Yoo et al., 2016). Analysis of the correlation between maximum punching arm speed and upper arm linear velocity and acceleration showed that the velocity of the punching arm was strongly positively correlated with the punching upper arm and forearm, and strongly negatively correlated with the pulling upper arm and fore- arm. Similar to Yoo's opinion (2015b) that the velocity of the pulling arm determines the punching velocity, the result of this study suggests that the faster the pulling arm is pulled, the greater the punching velocity.
Regarding the 3-dimensional trunk, pelvis, and waist angles, the trunk had right flexion during P1. We believe that as the fist was raised to shoulder height, the left shoulder was also raised during this phase. The trunk rotated 73° to the right, and the pelvis rotated 24° to the right. The waist angle, which is the angle of the trunk relative to the pelvis, rotated to the right by 52°. Choi (2013a, 2013b, 2013c), Choi et al. (2014), and Yoo (2015b) observed similar twisting patterns of the waist. At E1, the waist twisted in the direction opposite the punching arm, at the moment of reaching maximum punching speed (E2), it twisted in the direction of the punching arm.
There were huge variations in the angular velocities and accelerations about the left-right and anterior-posterior axes in the 3-dimensional angular velocities and accelerations of the trunk, pelvis, and waist; no regular pattern emerged. The trunk should be further divided into dif- ferent parts in future research. The angular velocities and acceleration of the trunk and pelvis about the vertical axis had a similar pattern as that observed in a study by Lee and Park (2015). This result was con- sistent with studies by Choi (2013a, 2013b), and Choi et al. (2014), who emphasized that the movement of the waist about the vertical axis was responsible for left rotation acceleration, in the direction opposite punching, at maximum punching speed. The power of the waist was positive, and became negative over time.
In correlating the trunk, pelvis, and waist angles with punching speed, maximum punching speed increased as the angle of trunk rotation about the vertical axis increased in the direction opposite punching, and the left flexion angle of the waist increased at E1. The maximum punching speed also increased as the rotation range of the trunk and the right flexion range of the waist about the vertical axis increased. During the P1, the maximum punching speed increased with the rotation velocity and acceleration of the trunk and the rotation velocity of the waist about the vertical axis. Similar to the results of studies by Choi (2013a, 2013b) and Choi et al. (2014), which emphasized the importance of the trunk, pelvis, and waist movements about the vertical axis during the execution of Jireugi, the movements of the trunk and waist in this study also appeared to have a positive influence on the punching speed.
In the multiple regression analysis results, the independent variables that had statistically significant explanatory power were the linear acceleration of the upper limbs and the rotation acceleration of the trunk. The maximum linear acceleration of the punching upper arm and the maximum right rotation angular acceleration of the trunk were statistically significantly positively correlated with punching speed. This means that punching speed increases as the rotation acceleration of the trunk and the linear acceleration of the upper arm increase in the direction of punching during P1. According to theories of motor mechanics, acceleration is defined as the rate of change of velocity, or the cause of changes in velocity (Hamill & Ryu, 2003). The rotation acceleration of the trunk and the linear acceleration of the upper arm are thus important factors in Jireugi punching speed.
In this study, multiple regression analysis was performed to investigate the influence of the kinematic factors of the upper limbs, trunk, pelvis, and waist on maximum punching speed. The multiple regression results showed that the linear acceleration of the punching upper arm and the rotation acceleration of the trunk had a statistically significant influence on the punching speed. The abilities to accelerate trunk and punching arm movements are important for successful Jireugi delivery.
References
1. Ahn, J. D. (2008). Picture analysis of motor control's property about the motion of stop-jirugi and push jirugi. The Journal of the Korea Contents Society, 8(8), 244-252.
Crossref
Google Scholar
2. Ahn, J. D. (2012). Comparative analysis of peak impulsive force and maximum velocity according to the Taekwondo Jeongkwon Jirigi's pattern. The Journal of the Korea Contents Society, 12(9), 389-395.
Crossref
Google Scholar
3. Choi, C. S. (2004). A comparative study of the impact forces on target distance and punching types during Taekwondo punching motions. Unpublished Master's Thesis. Graduate School of Seoul National University.
Crossref
4. Choi, C. S. (2013a). Biomechanical analysis of the axial pre-rotational movement of the pelvis for the Jireugi in the taekwondo Juchumseogi stance. Unpublished Doctor's Thesis. Graduate School of Seoul National University.
Crossref
5. Choi, C. S. (2013b). Bimenchanical characteristics and effects of the axial pre-rotational movement of the pelvis for the Jireugi in the Taekwondo Juchumseogi stance. Korean Journal of Sport Science, 24(3), 465-476.
Crossref
6. Choi, C. S. (2013c). Coordination pattern of the axial pre-rotational movement of the pelvis for the Jireugi in the Taekwondo Juchumseogi stance. Taekwondo Journal of Kukkiwon, 4(1), 43-59.
Crossref
7. Choi, C. S., Chung, C. S. & Shin, I. S. (2014). The Effect of Stretch- Shortening Cycle on the Joint Power of the Jireugi in the Taekwondo Juchumseogi Stance. Korean Journal of Sport Biomechanics, 24(1), 1-9.
Crossref
Google Scholar
8. Hamill, J. & Ryu, J. S. (2003). Experiment in Sport Biomechanics. Seoul: Daehanmedia.
Crossref
9. Kang, S. C., Kim, E. H., Shin, H. M., Kim, S. S. & Kim, T. W. (2007). A biomechanical analysis of four different taekwondo body punch types in horseback-riding stance. Korean Journal of Sport Biomechanics, 17(4), 201-208.
Crossref
Google Scholar
10. Korea Taekwondo Association [KTA] (2015). Poomsae Competition Rules & Interpretation.
Crossref
11. Kukkiwon (2006). Taekwondo Textbook. Seoul: Osung.
Crossref
12. Lee, H. Y., Kim, H. D. & Lee, S. U. (2010). The effect of Juchumseo Jireugi in Taekwondo speed of back extensor strength. Journal of Sport and Leisure Studies, 42, 1077-1086.
Crossref
13. Lee, Y. J. & Park, Y. S. (2015). Kinematic analysis of Zenkusu Dachi Seiken Gyaku In Kyokushin Karate. Journal of Korean Association of Physical Education and Sport for Girls and Woman, 29(4), 211-221.
Crossref
14. Park, J. I., Yoon, W. Y., Cho, C. H., Hyun, S. J., Lee, S. K. & Lee, B. C. (2008). The kinematic analysis of Juchumseo Jireugi In Taekwondo. Journal of Sport and Leisure Studies, 32, 1111-1118.
Crossref
15. Park, Y. C. (2007). An analysis on biomechanics of Taekwonddo body punch in horseback-riding stance. Unpublished Master's Thesis. Graduate School of Yongin University.
Crossref
16. Putnam, C. A. (1991). A segment interaction analysis of proximal-todistal sequential segment motion patterns. Medicine and Science in Sports and Exercise, 23(1), 130-144.
Crossref
Google Scholar
17. Putnam, C. A. (1993). Sequential motions of body segments in striking and throwing skills: descriptions and explanations. Journal of Biomechanics, 26(1), 125-135.
Crossref
Google Scholar
PubMed
18. Steindler, A. (1977). Kinesiology of the Human Body Under Normal & Pathological Conditions. ISBN-10: 0398064423.
Crossref
19. Winter, D. A. (2009). Biomechanics and Motor Control of Human Movement. Fourth edition.
Crossref
Google Scholar
20. Yoo, S. H. (2015a). Classification of the hand techniques by angular momentum in the Taekwondo Poomsae. Unpublished Doctor's Thesis. Graduate School of Korea National Sport University.
Crossref
21. Yoo, S. H. (2015b). Jireugi, which is correct? Proceeding of 1th Conference of Korea Society for Taekwondo, 1, 49-56.
Crossref
22. Yoo, S. H., Jung, K. H. & Ryu, J. S. (2016). Suggestion of new terminology and classification of the hand techniques by angular momentum in the Taekwondo Poomsae. Korean Journal of Sport Biomechanics, 26(1), 51-69.
Crossref
Google Scholar
