Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Sungmin Kim
Jeheon Moon
http://dx.doi.org/10.5103/KJSB.2021.31.3.205 Epub 2021 October 14
Abstract
Objective: The aim of this study was to analyze body stability Joint coordination pattern though as bending stiffness of shoes during stance phase of running.
Method: 47 male subjects (Age: 26.33 ± 2.11 years, Height: 177.32 ± 4.31 cm, Weight: 65.8 ± 3.87 kg) participated in this study. All subjects tested wearing the same type of running shoes by classifying bending stiffness (A shoes: 3.2~4.1 N, B shoes: 9.25~10.53 N, C shoes: 20.22~21.59 N). They ran 10 m at 3.3 m/s (SD ±3%) speed, and the speed was monitored by installing a speedometer at 3 m intervals between force plate, and the measured data were analyzed five times. During running, ankle joint, MTP joint, coupling angle, inclination angle (anterior-posterior, medial-lateral) was collected and analyzed. Vector coding methods were used to calculate vector angle of 2 joint couples during running: MTP-Ankle joint frontal plane. All analyses were performed with SPSS 21.0 and for repeated measured ANOVA and Post-hoc was Bonferroni.
Results: Results indicated that there was an interaction between three shoes and phases for MTP (Metatarsalphalangeal) joint angle (p = .045), the phases in the three shoes showed difference with heel strike~ impact peak (p1) (p = .000), impact peak~active peak (p2) (p = .002), from active peak to half the distance to take-off until take-off (p4) (p = .032) except for active peak~from active peak to half the distance to take-off (p3) (p = .155). ML IA (medial-lateral inclination angle) for C shoes was increased than other shoes. The coupling angle of ankle angle and MTP joint showed that there was significantly difference of p2 (p = .005), p4 (p = .045), and the characteristics of C shoes were that single-joint pattern (ankle-phase, MTP-phase) was shown in each phase.
Conclusion: In conclusion, by wearing high ㅊstiffness shoes, their body instability was increased during running.
Keywords
Shoes bending stiffness Inclination angle Joint coordination Running
신체의 안정성은 보행 및 달리기 시 신체의 동요를 안정적으로 유지하는 능력을 말한다(Winter, 2009). 특히, 신체의 균형 유지를 위해서는 신체 관절 간, 그리고 신체와 외부환경 사이의 적절한 상호작용이 요구된다. 하지만 이러한 상호작용이 이루어지지 않는다면, 신체 관절의 과도한 회전이 발생하면서 불안정한 움직임이 나타나게 된다(Horak, 2006). 신체의 불안정성이 지속될 경우 낙상과 같은 부상 위험이 증가하기 때문에 이전 연구에서는 신체 균형과 관련하여 많은 연구가 진행되었다. 특히 이들의 연구에서는 신체의 불안정성을 보완하기 위해 보행 및 달리기 시 보폭의 길이와 너비, 신체중심과 압력중심의 변화를 분석하는데 주안점을 두었다(Arif, Ohtaki, Nagatomi, Ishihara & Inooka, 2002; MacKinnon & Winter, 1993; Kaya, Krebs & Riley, 1998).
신발의 종류는 사용 목적에 따라 다양하게 설계되어 제작된다. Kim (2000)의 연구에 따르면 신발의 기능은 충격 흡수, 운동 조절, 안정성, 경량성, 착화감, 유연성 등 10가지가 넘는 요인들로 구성된다. 이들 요인 중 러닝화는 충격 흡수, 신체 안정성, 그리고 운동조절기능에 중점을 두어 착화감 향상 및 근육의 피로를 최소화하고 신체 불안정을 최소화하는데 도움을 준다. 따라서 러닝화 착용은 이러한 기능들을 통해 상해로부터 발과 신체를 보호하는 기능을 수행할 뿐만 아니라 경기력 향상에도 중요한 역할을 한다(Nigg, Bahlsen, Luethi & Stokes, 1987; Mok, Kwank & Kwon, 2004; Stefanyshyn & Fusco, 2004; Stefanyshyn & Nigg, 2000).
많은 선행연구에서 신발의 기능적 차이에 따른 생체역학적 접근방법 중 하나로 신발 내 굽힘 강성(bending stiffness)의 강도 조절을 통한 분석을 실시하였다. Oleson, Adler & Goldsmith (2005)의 연구에서는, 달리기 시 전방으로의 추진력을 강화하기 위해 이륙 구간에서 인위적으로 발허리발가락(MTP: Metatarsalphalangeal) 관절의 굽힘 모멘트와 수직 힘을 증가시킨 결과가 나타난 것을 제시하였고, 이러한 결과로 인해 달리기 시 MTP 관절의 강한 배측굴곡을 통한 높은 추진력을 발휘한다고 보고하였다. Lin et al. (2013)와 Stefanyshyn & Nigg (1997)의 연구에서는 신발의 굽힘 강성이 증가함에 따라 추진 시 손실되는 에너지를 감소시키는 동시에 전방으로 더 넓은 보폭과 높은 속도를 보여 일반 굽힘 강성과 대비한 결과에서 차이가 나타났다. 특히 그들의 연구에서 안쪽세로아치(medial longitudinal arch) 각도, 첫 번째 MTP 관절에는 전후면(sagittal plane) 각도 등 발 관절의 큰 변화가 없는 결과가 나타났는데, 이는 힘에 대한 손실을 감소시켜 신체 밸런스의 안정화 및 하지 부상 예방에 도움이 된다고 보고하였다. 또한, McLeod, Bruening, Johnson, Ward & Hunter (2020)의 연구에서도 달리기 시 최적의 운동을 수행하기 위해서는 신발의 굽힘 강성 강도를 증가시킬 필요가 있다고 하였다. 이들의 연구에서도 낮은 굽힘 강성을 가진 신발에 비해 높은 굽힘 강성을 가진 신발은 지지기 시 에너지 소모량(metabolic cost)을 감소시켜 빠른 추진력을 발생시킬 수 있는 요인으로 보고하였다. 하지만 이러한 연구들은 신발의 굽힘 강도를 증가시키면 운동수행력이 증가한다는 사실만을 보고하였고 일반 운동화 대비 어느 정도의 굽힘 강도가 효과적인지는 제시하지 않았다. 또한, 신발의 굽힘 강성 강도가 높을 시 하지 관절에 대한 운동생리학, 운동역학적인 변인을 주로 설명하였으며, 가장 많이 영향을 받는 MTP 관절, 발목 관절 각도의 영향 그리고 관절 각도에 따른 신체중심의 구체적인 움직임과 관련된 연구는 상대적으로 미흡하다는 한계가 있다.
달리기 시 하지 내에서 발의 궤적을 정확하게 조절하기 위해서는 적절한 다중관절 협응이 필요하다(Winter, 2009). 관절 협응(joint coord- ination)은 두 가지 이상의 관절이 조화롭게 움직이는 행위로, 동작의 목적에 따라 수행되는 신체 관절 간의 상대적인 움직임으로 정의할 수 있다. 두 관절이 생체역학적 자유도 내에서 필수적인 움직임에 대한 제어 순서가 원활하게 이루어져야 부드럽고 효과적인 움직임이 구현될 수 있다(Chiu, Lu & Chou, 2010; Ryan, Harrison & Hayes, 2006). 만약 비정상적인 관절의 협응이 지속적으로 발생할 경우 잘못된 과부하로 인한 근육의 피로도가 증가하고 이에 대한 신체의 불안정성 및 부상을 야기하는 등 부정적인 결과가 나타날 수 있는 것으로 보고하고 있다(Bates, Dufek & Davis, 1992; DeLeo, Dierks, Ferber & Davis, 2004).
따라서 본 연구의 목적은 달리기 시 신발의 굽힘 강성이 신체중심의 이동에 어떠한 영향을 미치는지를 규명하고 신발의 굽힘 강성에 직접적인 영향이 있는 MTP와 발목 관절의 협응 형태를 파악하는데 있다. 본 연구의 가설은 다음과 같다. 1) 달리기 시 신발의 굽힘 강성 증가에 따라 MTP 관절 각도의 변화는 감소할 것이고 2) 추진 구간에서 신체의 불안정성은 증가할 것이다. 마지막으로 3) 신발의 굽힘 강성이 증가하면 추진 시 지지하는 시간의 증가로 인해 단일 관절의 움직임이 각각 나타나 두 관절의 복합적인 움직임이 제한될 것이다.
1. 연구 대상
본 연구에서는 서울 소재의 A 대학 20대 일반 남학생 47명 대상으로 실험 6개월 전 정형외과적 부상이 없는 인원을 연구참여자로 선정하였다(Age: 26.33±2.11 years, Height: 177.32±4.31 cm, Weight: 65.8±3.87 kg). 동일한 조건에서 연구를 진행하기 위해 연구참여자의 조건을 BMI의 정상 범위인 20~25 사이로 제한하였다. 모든 연구참여자들은 실험에 대한 설명을 자세히 듣고 동의서에 서명을 한 후 실험에 참여하였다.
2. 자료 수집
신발의 굽힘 강성을 조절하는 방법은 신발의 미드솔(midsole) 위에 카본 섬유판(carbon fibre plate)을 집어넣어 보강하였다(Gregory, Axtell, Robertson & Lunn, 2018). 또한, 굽힘력 측정기를 사용하여 본 실험에 사용될 신발에 대한 굽힘 강성의 정도를 측정하였다. 측정방법은 굽힘력 측정기 위에 신발을 놓은 후 신발의 MTP 관절 부분을 수직 방향으로 고정시켰다. 고정시킨 MTP 관절을 중심으로 신발의 뒤꿈치 부위에 측정기의 기계적인 힘을 가해 45도까지 배측굴곡을 시킨 힘 값을 측정하였다. 신발들은 각 세 번의 측정을 통해 평균치가 계산되었다(Willwacher, König, Braunstein, Goldmann & Brüggemann, 2014). 그 결과 굽힘 강성은 일반 운동화의 강성(A 신발)을 기준으로, B 신발의 굽힘 강성은 A 신발의 약 2~3배, C 신발은 약 6~7배의 차이가 나타나는 기준으로 선정하였다(Stefanyshyn & Nigg, 2000). 또한 대상자 마다 발 사이즈의 차이가 나기 때문에 같은 굽힘 강도의 신발마다 세 가지 사이즈로 총 9개의 신발을 제작하였다(Table 1).
|
Shoes |
A shoe |
B shoe |
C shoe |
||||||||
|
Size (mm) |
255 |
260 |
265 |
255 |
260 |
265 |
255 |
260 |
265 |
||
|
Bending |
3.20±0.14 |
3.90±0.29 |
4.10±0.23 |
9.25±0.56 |
10.85±0.21 |
10.53±0.19 |
20.22±0.38 |
21.00±0.26 |
21.59±0.22 |
||
연구참여자들의 달리기 시 운동학적 변인을 측정하기 위해 지면반력 측정기를 중심으로 8대의 적외선 카메라(Raptor-4, Motion Analysis, Santa Rosa, CA, USA)를 설치하여 200 Hz의 속도로 촬영하였다. 상 · 하지의 신체 주요 관절과 관절에는 Helen-Hayes marker-set을 활용하여 반사 마커를 부착하였으며(Kadaba, Ramakrishnan & Wootten, 1990), 추가적으로 신발 위에 제1 발허리뼈(1st Metatarsal)과 제5 발허리뼈(5th Metatarsal)에 마커를 부착하였다. 이 마커들은 지면과 MPT 관절의 굴곡 각도, 발목 각도 그리고 관절의 협응을 분석하기 위해 사용되었다. 연구참여자들은 10 m 주로를 3.3 m/s (SD ±3%)로 달려(Hennig, Milani & Lafortune, 1993), 우측 발로 지면반력 측정기(Kistler 9281CA, Switzerland)에 착지할 수 있도록 충분한 연습을 수행하였다. 달리기 속도 통제는 3 m 간격의 구간 속도 측정기를 설치하여 모니터링하며 1,000 Hz로 수집하였다.
3. 자료처리 및 분석
1) 분석구간
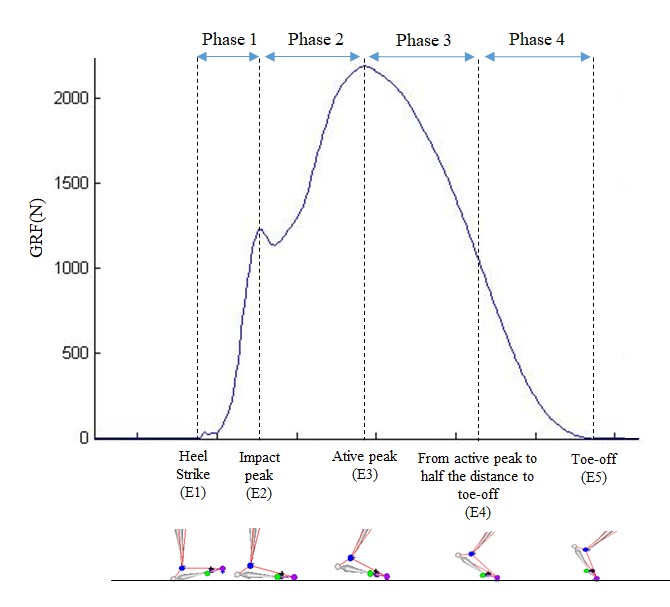
영상 데이터는 차단 주파수를 8 Hz로 설정한 뒤 4차 버터워스 저역통과필터(4th order Butterworth low-pass filter)를 사용하였다. 구간 이벤트는 지면반력 데이터를 이용하여 4개 기준으로 나누어 구분하였다(Hamill, van Emmerik, Heiderscheit & Li, 1999; Heiderscheit, Hamill & van Emmerik, 2002; Ferber, Davis & Williams, 2005). 1구간(phase 1, p1)은 발 뒤꿈치 착지(heel strike)에서 최대 충격 시점(impact peak)까지, 2구간(phase 2, p2)는 최대 충격 시점에서부터 최대 수직 지면반력(active peak)까지, 3구간(phase 3, p3)은 최대 수직 지면반력부터 이륙(toe off)의 절반 구간까지 설정하였고, 4구간(phase 4, p4)는 3구간이 끝나는 지점에서부터 이륙 시까지로 정의하였다(Figure 1). 수집된 자료는 Motion analysis (Motion Analysis Corporation, Santa Rosa, CA, USA) 및 Matlab R2014 (Mathworks, Natick, MA, USA)를 이용하여 분석하였다.
2) 측정 변인
(1) 발목 & MTP 관절 각도
신발의 굽힘 강성에 따라 관절의 협응력을 판단하기 위해 지지기에서 발생하는 발목 관절과 MTP 관절 구간 평균 각도를 전후면에서 계산하였다. MTP 관절 각도는 1번과 5번 MTP 마커의 중심점, 발뒤꿈치 마커, 발가락 마커를 이용하여 지지구간의 MTP 관절 각도를 분석하였다. 발목 관절 각도는 무릎, 발목 관절 그리고 발가락 마커를 이용하여 지지 구간의 발목 관절 각도를 분석하였다.
(2) 기울임 각도
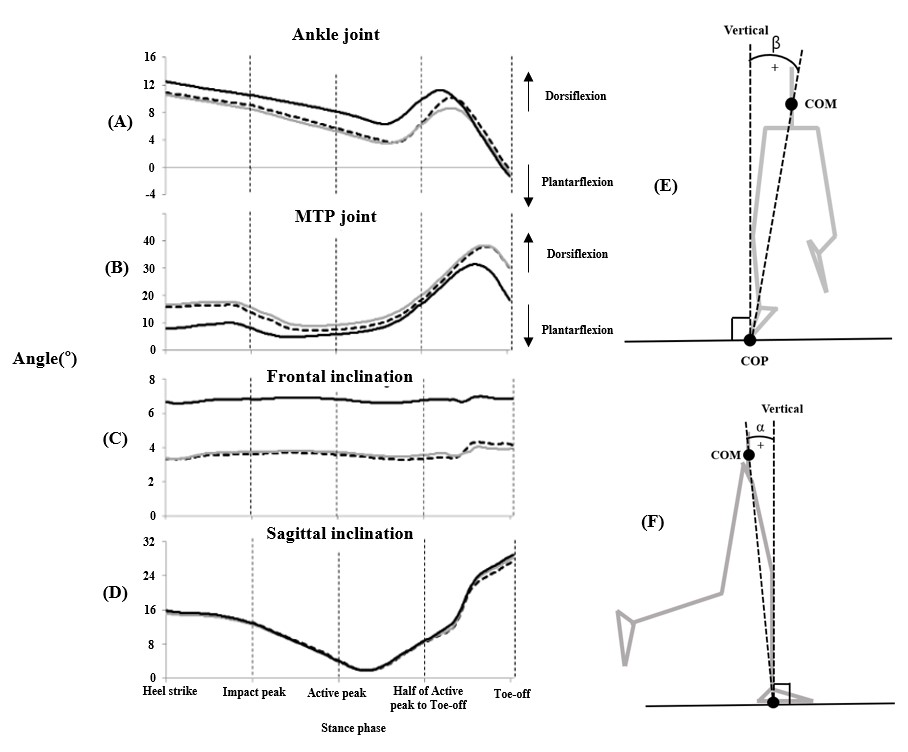
다수의 연구에서 신체중심(COM, Center of Mass)과 압력중심(COP, Center of Pressure)을 활용하여 달리기 상황에서의 신체 불안정성을 평가하였다(Hahn & Chou, 2004; Jian, Winter, Ishac & Gilchrist, 1993). 이중 많이 사용되는 분석방법으로 신체중심과 압력중심 간의 거리를 계산하는 방법이지만, 연구참여자들의 신체 구조(다리 길이, 키 등)에 따라 많은 영향을 받을 수 있기 때문에 높이와 수평 거리에 영향이 적은 기울기각(IA, Inclination Angle)을 사용하는 것이 더 효과적이라고 할 수 있다(Berger, Trippel, Discher & Dietz, 1992). 특히, 신체중심과 압력중심을 연결하는 선은 지지하는 발을 중심으로 신체중심의 위치를 파악할 수 있으며, 다양한 키를 가진 사람들에 대해서도 객관적으로 결과가 나타난 것으로 알려졌다(Duncan, Weiner, Chandler & Studenski, 1990; Allum, Zamani, Adkin & Ernst, 2002).
본 연구에서 신체중심 위치는 13개의 분절의 위치에 대한 합으로 계산되었다. 압력중심 위치는 지면반력기 측정기에 의해 계산되었다(Figure 2). 이를 토대로 전후면의 내외측(medial-lateral direction: ML)과 전후측 방향(anterior-posterior direction: AP)의 기울기각에 대한 구간 평균값은 다음과 같이 계산되었다.
여기서 P_(COM-COP)는 COP에서 COM으로 향하는 백터이고, Z는 좌표계의 수직축 백터 단위이다.
(3) 커플링 각도
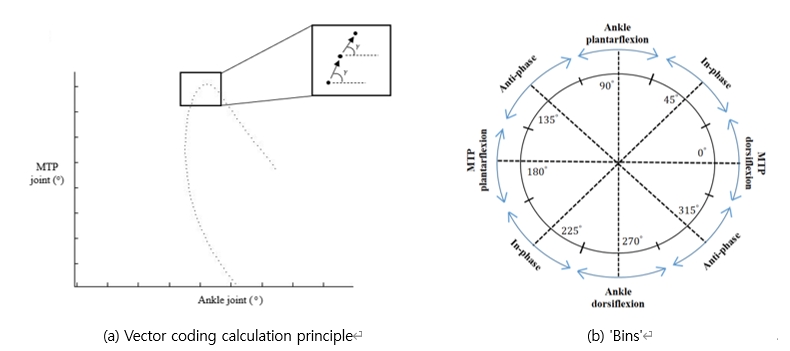
커플링 각도(CA, Coupling Angle)는 벡터 코딩 기술을 통해 관절 간의 협응을 정량화 해석을 실시하는 방법으로 최근 많은 연구에서 사용되고 있는 변인이다(Chang, Van Emmerik & Hamill, 2008). 본 연구에서는 관절 간 협응 능력을 확인하기 위해 벡터 코딩(vector coding) 기술을 이용한 커플링 각도를 사용하였다. 벡터 코딩은 Li, Alexander, Glazebrook & Leiter (2016) 연구에서 실시한 계산방법을 사용하였고, 커플링 각도 그래프에서 두 개의 인접한 데이터 포인트 사이를 우측 수평을 기준으로 벡터 각도를 계산하여 구간별 평균을 제시하였다(Figure 3a의 화살표와 우측 수평 축 사이 각도 참고).
커플링 각도는 0°부터 360° 범위 내에서 in-phase, anti-phase, out-of-phase (MTP-phase, Ankle-phase)로 구분할 수 있으며, in-phase 혹은 anti-phase 범위를 벗어날 때 out-of-phase로 정의하였다(Chang et al., 2008). Out-of-phase는 주로 한 관절 혹은 한 관절만이 움직이는 것으로, 만약 발목 관절에서만 움직임이 주로 발생하였을 경우 ankle-phase라고 칭한다. 이러한 4개의 협응 패턴은 커플링 각도 분포를 각각 45°(수직, 수평, 대각선(+, -))씩 나누는 분류 체계에서 시작된다. In-phase(대각선 방향의 45° 및 225° (-))는 두 관절이 서로 동일한 방향으로의 움직임이 나타나는 것이다. 예를 들면 발목 관절과 MTP 관절이 동시에 배측굴곡을 하거나 저측굴곡을 하는 동작을 말한다. Anti-phase(대각선 방향의 135° 및 315° (-))의 경우 두 관절이 서로 반대 방향으로의 움직임이 나타난다. 예를 들어 MTP 관절이 저측굴곡 시 발목 관절은 배측굴곡을 하는 동작을 말한다. 하지만 커플링 각도 분포가 수평 방향(γ = 0° or 180°)과 수직 방향(γ = 90° or 270°)으로 나타났을 시 단일 관절만 움직인 것으로 판단한다. 따라서 전체 동작 주기에 대한 커플링 각도 수치는 시간 흐름에 따라 'bins'를 통해 두 관절 사이의 협응 수준을 평가할 수 있다(Figure 3b).
4. 통계 처리
연구참여자가 달리기를 수행하는 동안 3가지 신발에 대해 각각 5회의 데이터를 수집하여 평균값을 통계분석에 활용하였다. 신발의 굽힘 강성에 따른 종속 변인의 차이를 검증하기 위해 SPSS 21.0 (IBM, USA)을 사용하여, 각 변인에 대한 기술통계분석과 일원변량분산분석(One-way ANOVA for repeated measure)을 실시하였다. Post-hoc 분석은 Bonferroni correction, 유의 수준은 α = .05로 설정하였다.
1. 발목 & MTP 관절 각도
세 가지 신발 간 발목과 MTP 관절의 각도를 분석한 결과, 발목 관절에서는 3구간에서만 통계적으로 유의한 차이가 나타났다(p = .000). MTP 관절의 경우 신발별로 3구간(p = .155) 구간을 제외하고 1구간(p = .000), 2구간(p = .002), 4 구간(p = .032) 구간에서 통계적으로 유의한 차이가 나타났다(Table 2).
2. 전후 & 좌우 기울임 각도
세 가지 신발 간 좌우 기울기각의 경우 4구간에서 통계적으로 유의한 차이가 나타났고(p = .004), 나머지 구간에서는 차이가 나타나지 않았다. 또한 전후 기울기각의 경우 모든 구간에서 통계적으로 유의한 차이가 나타나지 않았다(Table 2).
3. 커플링 각도
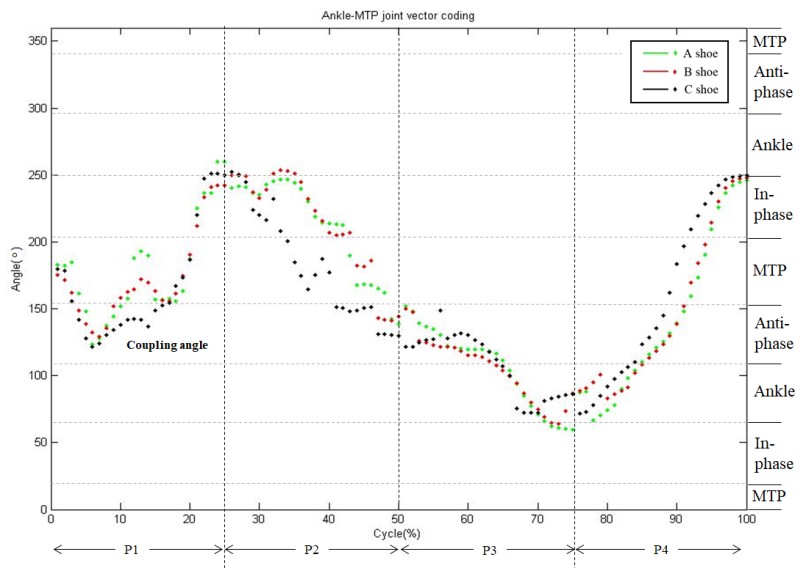
발목 관절과 MTP 관절의 커플링 각도는 2구간(p = .005), 4구간(p = .045) 구간에서 통계적으로 차이가 나타났다. 1구간과 3구간에서는 통계적으로 차이가 나타나지 않았다. 특히, 2구간에서 A, B 신발은 in-phase가 나타났지만, C 신발은 MTP-phase가 나타났고, 4구간에서는 A, B 신발의 경우 anti-phase가 나타났지만, C 신발에서는 오직 MTP-phase만 나타났다. (Figure 4)는 커플링 각도의 전체 주기를 그래프로 표현한 그림이다. 그리고 오른쪽 축은 데이터가 어떤 협응 phase를 수행하고 있는지 제시하였다(Table 2).
|
Phase |
Shoes |
F |
p |
Post-hoc |
||
|
A |
B |
C |
||||
|
Ankle angle (deg) |
||||||
|
p1 |
10.57±6.98 |
10.09±8.07 |
12.09±7.68 |
.331 |
.720 |
NS |
|
p2 |
7.81±5.94 |
7.21±6.95 |
9.83±6.97 |
.749 |
.478 |
NS |
|
p3 |
4.91±3.97 |
4.66±3.97 |
7.92±4.94 |
3.456 |
.042* |
A, B < C |
|
p4 |
7.05±3.00 |
5.99±3.85 |
7.06±4.64 |
.422 |
.658 |
NS |
|
MTP angle (deg) |
||||||
|
p1 |
16.05±5.05 |
17.17±4.19 |
9.02±3.17 |
18.467 |
.000* |
B > A, C |
|
p2 |
8.90±3.83 |
10.58±4.00 |
5.58±3.59 |
7.415 |
.002* |
A, B < C |
|
p3 |
11.15±4.96 |
12.91±4.84 |
9.49±5.12 |
1.939 |
.155 |
NS |
|
p4 |
31.10±8.19 |
32.07±7.52 |
25.97±7.50 |
4.636 |
.032* |
A, B > C |
|
ML inclination angle (deg) |
||||||
|
p1 |
3.5±1.45 |
3.59±1.91 |
4.32±2.9 |
1.501 |
.240 |
NS |
|
p2 |
3.66±1.45 |
3.78±2.02 |
4.47±2.99 |
1.289 |
.276 |
NS |
|
p3 |
3.39±1.42 |
3.55±1.96 |
4.27±3.11 |
1.307 |
.272 |
NS |
|
p4 |
3.87±1.98 |
3.79±2.14 |
7.8±3.77 |
10.777 |
.004* |
A, B < C |
|
AP inclination angle (deg) |
||||||
|
p1 |
14.7±2.04 |
14.29±2.29 |
14.8±2.26 |
2.042 |
.146 |
NS |
|
p2 |
8.74±1.66 |
8.4±1.82 |
8.53±1.93 |
.659 |
.516 |
NS |
|
p3 |
4.17±0.62 |
4.22±0.67 |
4.34±0.87 |
.553 |
.534 |
NS |
|
p4 |
18.53±2.76 |
19.18±2.14 |
19.67±2.25 |
2.398 |
.114 |
NS |
|
Coupling angle (deg) |
||||||
|
p1 |
179.18±23.25(M) |
174.3±25.95(M) |
168.7±21.48(M) |
.790 |
.460 |
NS |
|
p2 |
211.11±25.95(I) |
212.05±25.22(I) |
180.87±35.22(M) |
6.010 |
.005* |
A, B > C |
|
p3 |
105.6±18.29(A) |
104.15±27(A) |
107.51±36.26(A) |
.057 |
.944 |
NS |
|
p4 |
141.31±20.84(a) |
145.5±20.91(a) |
159.55±21.64(M) |
3.325 |
.045* |
A, B < C |
|
I = in-phase, a = anti-phase, M = MTP-phase, A = Ankle-phase *p < .05 |
||||||
본 연구의 목적은 달리기 시 신발의 굽힘 강성 강도에 따라 신체중심의 이동에 어떠한 영향을 미치는지를 규명하고 신발의 굽힘 강성에 직접적인 영향이 있는 MTP 관절과 발목 관절의 협응 형태를 파악하였다. 이 실험에서 연구참여자들은 굽힘 강성이 다른 세 가지 신발을 착용 후 달리기를 실시하였고, 수집된 데이터를 통해 신발 간 운동학적 변인 차이를 비교, 분석하였다.
착지 구간인 1구간에서는 세 가지 신발 모두 MTP 관절 각도에서 차이가 발생하였고 협응 패턴은 주로 MTP 관절의 배측굴곡이 일어났다. Oh & Park (2017) 연구에서 높은 굽힘 강성을 가진 신발의 MTP 관절 각도는 낮은 굽힘 강성의 신발 보다 최대 5도 이상의 각도 차이가 나타나 본 연구 결과와 유사하게 나타났다. 그들은 지지기 초반에 MTP 관절의 배측굴곡이 제한되어 다음 동작에서 충격력이 높게 발생할 수 있다고 하였다. 이러한 원인은 지지기 초반에 발가락 부위에서 능동적으로 배측굴곡을 수행해야 하지만 높은 굽힘 강성으로 인해 배측굴곡이 제한되는 영향으로 MTP 관절의 모멘트 암(moment arm) 길이를 증가시키기 때문이다. 따라서 지지기 초반에 MTP 관절의 움직임 차이로 인해 최대 수직 지면반력 지점에서 이륙 시까지 발목 관절의 모멘트 감소를 포함하여 전반적인 발목과 MTP 관절의 운동학 및 운동역학적 변인에 영향을 준다고 설명하고 있다(Willwacher et al., 2014).
2구간의 경우 A, B 신발은 in-phase, C 신발은 MTP-phase가 나타났다. 2구간은 부하 반응기와 중간 입각기(mid-stance)에 해당되는 구간으로 지지 기간에서 힘이 가장 많이 실리는 구간이다(Perry & Burnfield, 2010; Lee &, Ryu, 2019). 하지만 높은 굽힘 강성을 가진 C 신발은 힘을 많이 사용하는 구간에서도 주로 MTP 관절의 움직임이 발생하였고, A, B 신발 보다 작은 관절 각도가 나타났다. 이는 1구간에서 낮은 MTP 관절 각도가 2구간에서도 그대로 반영된 것으로 주로 배측굴곡과 저측굴곡의 움직임이 빠르게 수행된 것으로 해석할 수 있다. 이에 따라 MTP 관절을 배측굴곡 시킬 수 있는 힘이 임계점에 가까워지면 빠른 저측굴곡을 실시하여 지면에 발바닥 전체가 접촉하는 시간이 다른 신발 보다 일찍 수행된 것으로 판단된다(Oleson et al., 2015; Goldmann, Sanno, Willwacher, Heinrich & Bruggemann, 2011). 이러한 경우 앞정강근(tibialis anterior)의 활성화가 주로 일어나야 하는 상황이지만, 반대로 장딴지근(gastrocnemius)의 활성화가 이른 시간에 발생되어 신체에 가해지는 충격은 더욱 증가하게 된다(Stefanyshyn & Nigg, 2000; Lin et al., 2013; Burnfield, & Perry, 2010). 반대로 A, B 신발은 굽힘 강성 정도가 낮기 때문에 관절 축의 위치와 회전 속도를 쉽게 조절할 수 있어 관절 각도 역시 원활하게 조절할 수 있는 장점이 있다(Smith, Lake, Lees & Worsfold, 2012). 두 신발은 MTP 관절의 회전 속도를 조절하면서 동시에 발목의 배측굴곡을 수행하여 in-phase 협응이 수행될 수 있었다. 따라서 지면과의 접촉 시간을 감소시켜 3, 4구간에 짧은 시간 내 큰 힘을 발휘하기 위한 원동력이 제공된 것으로 판단된다(Goldmann, Sanno, Willwacher, Heinrich & Bruggemann, 2013).
3구간에서는 세가지 신발 모두 ankle-phase, 즉 발목 관절에서 배측굴곡이 주로 일어났다. Roy & Stefanyshyn (2006)의 연구 결과를 보면 발바닥 전체가 지면에 접촉하면서 발목의 배측굴곡과 함께 신체중심이 앞으로 이동한 후 발 뒤꿈치는 지면에서 떨어진다고 하였다. 따라서 주로 발목 관절의 움직임이 나타났고 MTP 관절에서는 움직임이 많이 나타나지 않았다. 이러한 결과는 발바닥 전체가 지면에 닿은 후 신발의 굽힘 강성 영향을 가장 적게 받는 구간이고 발목 관절에서 먼저 수동적인 배측굴곡이 일어난 후 MTP 관절의 움직임이 일어나기 때문에 ankle-phase만 수행된 것으로 판단된다. 하지만 C 신발의 발목 관절 움직임은 A, B 신발 보다 더 크게 수행되었다. C 신발은 높은 굽힘 강성으로 인해 발생되지 못했던 1, 2구간에서의 발목 관절의 배측굴곡이 3구간에서 많이 발생하였으며, 이 결과는 신체를 전방으로 추진시키기 위한 보상작용이 나타난 것으로 판단된다.
4구간은 유각기(swing phase) 전 마지막 이륙을 하는 구간으로, MTP 관절의 최대 배측굴곡이 일어나는 구간이다. A, B 신발의 경우 anti-phase(MTP 관절의 배측굴곡과 발목의 저측굴곡) 협응이 나타났지만, C 신발의 경우 1, 2 구간과 같이 MTP-phase가 나타나 선행연구와 일치한 결과를 보였다(Nigg & Segesser, 1992; Ryu, 2006). 특히, A, B 신발의 MTP 관절 각도는 C 신발 보다 크게 나타났는데, 이 구간에서는 MTP 관절의 큰 각도를 통해 신체가 전방으로 빠르게 이동할 수 있을 것으로 생각된다. 왜냐하면 발목 관절의 움직임이 발생하면서 MTP 관절의 움직임이 최대로 발생될 경우 발목 관절의 저측굴곡 모멘트가 수직 방향으로 최대 힘을 발휘할 수 있기 때문이다(Willwacher et al., 2014; Willwacher, König, Brüggemann & Potthast 2013; Perry & Burnfield, 2010). 반면에 높은 굽힘 강성을 가지게 되면, 발목 관절의 모멘트가 상대적으로 적게 발생하여 전방으로의 추진력이 감소할 것으로 예상된다. 따라서 추진력이 필요한 운동을 수행할 경우 신발 굽힘 강성의 적절한 탄력을 적용시켜 MTP 관절의 움직임이 강하게 제한되지 않게 조절할 필요가 있다(Oh & Park, 2017).
본 연구에서는 달리기 시 동적 안정성과 자세 동요를 정량화하기 위해서 전후, 좌우 방향의 신체 기울임 각도를 분석하였다. 1, 2, 3구간에서는 전후, 좌우 기울임 각도에서 세 가지 신발 모두 통계적으로 유의한 차이가 나타나지 않았다. 하지만 4 구간에서 C 신발은 A, B 신발보다 좌우 각도 움직임에서 통계적인 차이가 나타났다. 위에서 언급하였다시피 달리기 시 마지막 도약 지점에서 MTP 관절의 최대 배측굴곡이 동반되어야 전상방으로 나가는 최대 추진력을 발생시킬 수 있다. 하지만 MTP 관절의 배측굴곡 각도가 이륙 시 충분히 발생되지 않으면 신체중심이 위로 움직이는 결과를 가져올 수 있기 때문에, 신체중심의 위치가 높아지면서 좌우 방향으로의 움직임이 많이 발생될 수 있다(Ijmker, Houdijk, Lamoth, Beek & Woude, 2013; Holt, Wagenaar, LaFiandra, Kubo & Obusek, 2003). 특히, 도약 시 신체중심의 좌우 움직임이 크게 나타난다면, 전방으로 향하는 신체의 움직임이 일정하게 유지되지 못하고 흔들리면서 주행하게 되며(Hamill et al., 1999), 이로 인해 신체중심의 좌우 기울임 각도가 증가한다는 보고가 있다(Chou, Kaufman, Hahn & Brey, 2003). 따라서 신발 앞쪽의 굽힘 강성 구조를 적절하게 조절하는 부분은 신체의 안정성을 증가시키는데 중요한 역할을 하는 것으로 판단된다(Tinoco, Bourgit & Morin, 2010; Willwacher et al., 2013).
본 연구의 목적은 달리기 시 신발의 굽힘 강성에 따라 신체중심 이동에 어떠한 영향을 미치는지를 규명하고 신체의 움직임에서 신발의 굽힘 강성에 직접적인 영향이 있는 MTP와 발목 관절의 협응 형태를 파악하였다. 세 가지 굽힘 강성 러닝화 중 높은 굽힘 강성을 가진 신발은 일반 신발에 비해 약 6~7배 높은 강성 수준을 가지고 있기 때문에 일반 신발과 낮은 굽힘 강성을 가진 신발에 비해 단일 관절의 움직임이 주로 나타났다. 도약구간에서는 MTP 관절의 배측굴곡이 감소하면서 신체중심의 좌우 움직임이 증가하는 결과를 보였다. 이와 같은 연구 결과를 선행연구의 결과와 종합해 보았을 때, 10~11 N(일반 러닝화의 2~3배의 굽힘 강성) 수준의 신발 굽힘 강도 증가는 달리기 수행 능력 측면에서 도움이 될 것으로 보인다. 또한 높은 굽힘 강성 신발의 관절 협응은 각 관절의 움직임이 단일적으로 일어나면서 신체 균형의 좌우 움직임이 크게 나타난 것으로 확인하였다.
본 연구에서는 신발의 굽힘 강성 변화를 단시간 적용하여 신체와의 상호작용을 파악하는데 그쳤으나, 향후 러닝화 목적에 따라 굽힘 강성에 따른 훈련 효과, 장거리 달리기 시 신체에 미치는 영향, 부상 가능성 예측 및 회복 등 다양한 분야의 연구가 진행되길 기대한다.
References
1. Allum, J. H. J., Zamani, F., Adkin, A. L. & Ernst, A. (2002). Differences between trunk sway characteristics on a foam support surface and on the Equitest® ankle-sway-referenced support surface. Gait and Posture, 16(3), 264-270.
Google Scholar
2. Arif, M., Ohtaki, Y., Nagatomi, R., Ishihara, T. & Inooka, H. (2002, October). Analysis of the effect of fatigue on walking gait stability. In Pro- ceedings of 2002 international symposium on micromechatronics and human science (pp. 253-258). IEEE.
Google Scholar
3. Bates, B. T., Dufek, J. S. & Davis, H. P. (1992). The effect of trial size on statistical power. Medicine and Science in Sports and Exercise, 24(9), 1059-1068.
Google Scholar
4. Berger, W., Trippel, M., Discher, M. & Dietz, V. (1992). Influence of Sub- jects' Height on the Stabilization of Posture. In Acta Otolaryngol (Stockh) (Vol. 112).
Google Scholar
5. Chang, R., Van Emmerik, R. & Hamill, J. (2008). Quantifying rearfoot-forefoot coordination in human walking. Journal of Biomechanics, 41(14), 3101-3105.
Google Scholar
6. Chiu, S. L., Lu, T. W. & Chou, L. S. (2010). Altered inter-joint coord- ination during walking in patients with total hip arthroplasty. Gait and Posture, 32(4), 656-660.
Google Scholar
7. Chou, L. S., Kaufman, K. R., Hahn, M. E. & Brey, R. H. (2003). Medio-lateral motion of the center of mass during obstacle crossing distinguishes elderly individuals with imbalance. Gait & Posture, 18(3), 125-133.
Google Scholar
8. DeLeo, A. T., Dierks, T. A., Ferber, R. & Davis, I. S. (2004). Lower extremity joint coupling during running: A current update. Clinical Bio- mechanics, 19(10), 983-991.
Google Scholar
9. Duncan, P. W., Weiner, D. K., Chandler, J. & Studenski, S. (1990). Functional reach: a new clinical measure of balance. Journal of Gerontology, 45(6), M192-M197.
Google Scholar
10. Ferber, R., Davis, I. M. C. & Williams, D. S. (2005). Effect of foot orthotics on rearfoot and tibia joint coupling patterns and variability. Journal of Biomechanics, 38(3), 477-483.
Google Scholar
11. Goldmann, J. P., Sanno, M., Willwacher, S., Heinrich, K. & Brüggemann, G. P. (2013). The potential of toe flexor muscles to enhance per- formance. Journal of Sports Sciences, 31(4), 424-433.
Google Scholar
12. Gregory, R. W., Axtell, R. S., Robertson, M. I. & Lunn, W. R. (2018). The Effects of a Carbon Fiber Shoe Insole on Athletic Performance in Collegiate Athletes. Journal of Sports Science, 6(4), 219-230.
Google Scholar
13. Hahn, M. E. & Chou, L. S. (2004). Age-related reduction in sagittal plane center of mass motion during obstacle crossing. Journal of Biomechanics, 37(6), 837-844.
Google Scholar
14. Hamill, J., Van Emmerik, R. E. A., Heiderscheit, B. C. & Li, L. (1999). A dynamical systems approach to lower extremity running injuries. Clinical Biomechanics, 14(5), 297-308.
Google Scholar
15. Heiderscheit, B. C., Hamill, J. & Van Emmerik, R. E. A. (2002). Variability of stride characteristics and joint coordination among individuals with unilateral patellofemoral pain. Journal of Applied Biomechanics, 18(2), 110-121.
Google Scholar
16. Hennig, E. M., Milani, T. L. & Lafortune, M. A. (1993). Use of ground reaction force parameters in predicting peak tibial accelerations in running. Journal of Applied Biomechanics, 9(4), 306-314.
Google Scholar
17. Holt, K. G., Wagenaar, R. C., LaFiandra, M. E., Kubo, M. & Obusek, J. P. (2003). Increased musculoskeletal stiffness during load carriage at increasing walking speeds maintains constant vertical excursion of the body center of mass. Journal of Biomechanics, 36(4), 465-471.
Google Scholar
18. Horak, F. B. (2006). Postural orientation and equilibrium: what do we need to know about neural control of balance to prevent falls?. Age and Ageing, 35(suppl_2), ii7-ii11.
Google Scholar
19. Ijmker, T., Houdijk, H., Lamoth, C. J. C., Beek, P. J. & van der Woude, L. H. V. (2013). Energy cost of balance control during walking decreases with external stabilizer stiffness independent of walking speed. Journal of Biomechanics, 46(13), 2109-2114.
Google Scholar
20. Jian, Y., Winter, D. A., Ishac, M. G. & Gilchrist, L. (1993). Trajectory of the body COG and COP during initiation and termination of gait. Gait & Posture, 1(1), 9-22.
Google Scholar
21. Kadaba, M. P., Ramakrishnan, H. K. & Wootten, M. E. (1990). Measure- ment of lower extremity kinematics during level walking. Journal of Orthopaedic Research, 8(3), 383-392.
Google Scholar
22. Kaya, B. K., Krebs, D. E. & Riley, P. O. (1998). Dynamic stability in elders: Momentum control in locomotor ADL. Journals of Gerontology - Series A Biological Sciences and Medical Sciences, 53(2), M126-M134.
Google Scholar
23. Kim, S. K. (2000). The patterns and directions of technological innovation. Seoul: Science & Technology Policy Institute, p 1-154.
24. Lee, Y. S. & Ryu, J. S. (2019). The relationship between anthropometric parameters of the foot and kinetic variables during running. Korean Journal of Sport Biomechanics, 29(3), 173-183
Google Scholar
25. Li, Y., Alexander, M., Glazebrook, C. & Leiter, J. (2016). Quantifying inter-segmental coordination during the instep soccer kicks. International Journal of Exercise Science, 9(5), 646-656.
Google Scholar
26. Lin, S. C., Chen, C. P. C., Tang, S. F. T., Wong, A. M. K., Hsieh, J. H. & Chen, W. P. (2013). Changes in windlass effect in response to different shoe and insole designs during walking. Gait and Posture, 37(2), 235-241.
Google Scholar
27. MacKinnon, C. D. & Winter, D. A. (1993). Control of whole body balance in the frontal plane during human walking. Journal of Biomechanics, 26(6), 633-644.
Google Scholar
28. Mok, S. H., Kwank, C. S. & Kwon, O. B. (2004). The influence of midsole hardness of running shoes on shoes flex angle during running. Korean Journal of Sport Biomechanics, 14(2), 85-103.
Google Scholar
29. McLeod, A. R., Bruening, D., Johnson, A. W., Ward, J. & Hunter, I. (2020). Improving running economy through altered shoe bending stiffness across speeds. Footwear Science, 12(2), 79-89.
Google Scholar
30. Nigg, B., Hintzen, S. & Ferber, R. (2006). Effect of an unstable shoe construction on lower extremity gait characteristics. Clinical Bio- mechanics, 21(1), 82-88.
Google Scholar
31. Nigg, B. M., Bahlsen, H. A., Luethi, S. M. & Stokes, S. (1987). The influence of running velocity and midsole hardness on external impact forces in heel-toe running. Journal of Biomechanics, 20(10), 951-959.
Google Scholar
32. Nigg, B. M. & Segesser, B. (1992). Biomechanical and orthopedic con- cepts in sport shoe construction. Medicine and Science in Sports and Exercise, 24(5), 595-602.
Google Scholar
33. Oh, K. & Park, S. (2017). The bending stiffness of shoes is beneficial to running energetics if it does not disturb the natural MTP joint flexion. Journal of Biomechanics, 53, 127-135.
Google Scholar
34. Oleson, M., Adler, D. & Goldsmith, P. (2005). A comparison of forefoot stiffness in running and running shoe bending stiffness. Journal of Biomechanics, 38(9), 1886-1894.
Google Scholar
35. Opila-Correia, K. A. (1990). Kinematics of high-heeled gait with con- sideration for age and experience of wearers. Archives of Physical Medicine and Rehabilitation, 71(11), 905-909.
Google Scholar
36. Perry, J. & Burnfield, J. M. (2010). Gait analysis. Normal and pathological function 2nd ed. California: Slack.
Google Scholar
37. Roy, J. P. R. & Stefanyshyn, D. J. (2006). Shoe midsole longitudinal bending stiffness and running economy, joint energy, and EMG. Medicine & Science in Sports & Exercise, 38(3), 562-569.
Google Scholar
38. Ryan, W., Harrison, A. & Hayes, K. (2006). Functional data analysis of knee joint kinematics in the vertical jump. Sports Biomechanics, 5(1), 121-138.
Google Scholar
39. Ryu, J. S. (2006). Analysis of the lower extremity's coupling angles during forward and backwar running. Korean Journal of Sport Bio- mechanics, 16(3), 149-163.
Google Scholar
40. Smith, G., Lake, M., Lees, A. & Worsfold, P. (2012). Measurement procedures affect the interpretation of metatarsophalangeal joint function during accelerated sprinting. Journal of Sports Sciences, 30(14), 1521-1527.
Google Scholar
41. Stefanyshyn, D. & Fusco, C. (2004). Athletics: Increased shoe bending stiffness increases sprint performance. Sports Biomechanics, 3(1), 55-66.
Google Scholar
42. Stefanyshyn, D. J. & Nigg, B. M. (1997). Mechanical energy contribution of the metatarsophalangeal joint to running and sprinting. Journal of Biomechanics, 30(11-12), 1081-1085.
Google Scholar
43. Stefanyshyn, D. J. & Nigg, B. M. (2000). Influence of midsole bending stiffness on joint energy and jump height performance. Medicine and Science in Sports and Exercise, 32(2), 471-476.
Google Scholar
44. Tinoco, N., Bourgit, D. & Morin, J. B. (2010). Influence of midsole metatarsophalangeal stiffness on jumping and cutting movement abilities. Proceedings of the Institution of Mechanical Engineers, Part P: Journal of Sports Engineering and Technology, 224(3), 209-217.
Google Scholar
45. Willwacher, S., König, M., Braunstein, B., Goldmann, J. P. & Brüggemann, G. P. (2014). The gearing function of running shoe longitudinal bending stiffness. Gait and Posture, 40(3), 386-390.
Google Scholar
46. Willwacher, S., König, M., Potthast, W. & Brüggemann, G. P. (2013). Does specific footwear facilitate energy storage and return at the meta- tarsophalangeal joint in running?. Journal of Applied Biomechanics, 29(5), 583-592.
Google Scholar
47. Winter, D. A. (2009). Biomechanics and Motor Control of Human Movement (4th ed.). Ontaio: John Wiley & Sons Inc
Google Scholar
