Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Young-Kwan Kim
http://dx.doi.org/10.5103/KJSB.2021.31.3.199 Epub 2021 October 14
Abstract
Objective: The purpose of this study was to present a new idea of methodology to evaluate Poomsae performance using inertial measurement unit (IMU) sensors in terms of signal processing techniques.
Method: Ten collegian Taekwondo athletes, consisting of five Poomsae elite athletes (age: 21.4 ± 0.9 years, height: 168.4 ± 11.3 cm, weight: 65.0 ± 10.6 kg, experience: 12 ± 0.7 years) and five breaking demonstration athletes (age: 21.0 ± 0.0 years, height: 168.4 ± 4.7 cm, weight: 63.8 ± 8.2 kg, experience: 13.0 ± 2.1 years), voluntarily participated in this study. They performed three different black belt Poomsae such as Goryeo, Geumgang, and Taebaek Poomsae repeatedly twice. Repeated measured motion data on the wrist and ankle were calculated by the methods of cosine similarity and Euclidean distance.
Results: The Poomsse athletes showed superior performance in terms of temporal consistency at Goryeo and Taebaek Poomsae, cosine similarity at Geumgang and Taebaek Poomsae, and Euclidian distance at Geumgang Poomsae.
Conclusion: IMU sensor would be a useful tool for monitoring and evaluating within-subject temporal variability of Taekwondo Poomsae motions. As well it distinguished spatiotemporal characteristics among three different Poomsae.
Keywords
Taekwondo Poomsae Cosine similarity Euclidean distance
태권도는 전세계적으로 널리 보급된 무술 스포츠이다. 현재 206개국에 걸쳐 태권도 사범들이 활동하고 있으며 약 7천만명 이상의 세계인들이 태권도를 수련하고 있다. 태권도 겨루기는 2000년 시드니하계올림픽부터 정식종목으로 채택되어 2021년 2020 동경하계올림에서도 실시되었다. 규모가 작은 나라들도 우수한 선수를 양성하면 올림픽 메달을 획득할 수 있는 개인종목이기 때문에 개발도상국가들에게 태권도의 인기가 높다.
태권도 공인 기관인 국기원에서 태권도 기술 체계와 지침을 규정하고 발전시키고 있다. 겨루기는 태권도 기술 체계 가운데 가장 먼저 경기화가 되었다. 1973년 제1회 세계선수권대회 때부터 겨루기 경기를 펼쳤으며 현재 올림픽 태권도도 겨루기이다. 전자호구는 2009년 코펜하겐 세계선수권대회에서 처음으로 채택되었고, 심판의 주관적 판단으로 결정되던 채점 시스템은 전자채점제로 바뀌게 되었다. 이로 인해 판정의 공정성을 담보하게 되었고, 올림픽에서는 2012년 런던하계올림픽부터 도입되어 지금까지 사용되고 있다.
품새는 겨루기보다 뒤늦게 경기화의 길을 갔다. 1992년 제1회 태권도 한마당에서 품새 경기화가 처음 시도되었다. 이 후에 각종 품새대회가 열렸으며, 점점 경기 품새 규정이 발전하게 되었다. 현재 겨루기와 별로도 세계태권도품새선수권대회가 있으며 남녀개인전, 단체전, 페어, 프리스타일 등 총 36개 부문의 세부 경기가 치러진다.
품새가 경기화되면서 평가의 공정성이 문제가 되었다. 규정 품새(태극 품새나 유단자 품새)는 국기원에서 발간한 태권도 교본에 근거하여 채점 기준을 정한다(Kukkiwon, 2006). 하지만 실제 품새 경기에서 주관적인 심판 판단이 결과에 영향을 주고 있어, 코치나 선수들이 때로 심판 판정을 신뢰하지 않기도 한다(Lee & Park, 2007). 그 이유는 정성적인 준거에 의존하여 평가가 이루어지고, 심판의 주관성을 완벽히 배제할 수 없기 때문이다. 겨루기는 전자호구의 도입으로 판정 시비를 배제하는데 성공하였다. 그러나 품새는 아직까지 공정성 시비를 벗어나지 못하고 있는 실정이다.
스포츠 현장에서 객관적이고 정량적인 측정도구로 최근 관성센서를 많이 사용되고 있다. 3축 선형 가속도와 3축 각속도를 측정할 수 있는 관성센서(inertial measurement units, IMU)는 웨어러블 기기로 쉽게 활용될 수 있어 운동 측정학 분야에서 많이 활용되고 있다(Cho et al., 2015; Ko & Ban, 2014; Lee, 2009). 관성센서는 신호의 끊김이 없고 사용이 편리하다는 장점과 시계열 데이터의 정확성이 우수하다. 이에 따라 지금까지 체육 및 신체 활동량의 연구와 리듬이 있은 보행 연구 등에 많이 활용되고 있다(Fusca et al., 2018; Seel, Raisch & Schauer, 2014).
태권도의 규정 품새(태극 품새와 유단자 품새)는 동작의 표준화와 정량화를 쉽게 할 수 있다(Kim, 2020; Ryu, 2020; Ryu, Ryu, Park & Yoon, 2012; So, Kang, Hong, Jung & Kim, 2016). 진행되는 품새의 길과 동작의 세부 사항이 태권도 교본에 제시되어 있기 때문에 연속적인 동작들의 시계열 패턴이나 가변성을 관성센서로 측정하고 정량화하는 것이 가능하다. 또한, 관성센서를 활용하여 다양한 연령대와 수준별 방대한 품새 데이터가 축적된다면 개인 능력의 상대평가와 학습 수준을 판단할 수 있는 규준(norm)이 만들어질 수 있다. 따라서, 본 연구의 목적은 관성센서를 이용하여 태권도 품새 동작을 측정하고, 분석 결과를 바탕으로 품새 경기력을 평가하는 도구로서 타당성이 있는지를 파악하는데 있다
1. 연구대상자
대학교 태권도 선수 10명이 본 연구에 자발적으로 참여하였다. 10명의 선수 가운데 5명은 대학교 태권도 품새선수(나이: 21.4±0.9세, 신장: 168.4±11.3 cm, 질량: 65.0±10. 6kg, 태권도 경력: 12±0.7년)이고, 나머지 5명은 대학교 태권도 시범선수(나이: 21.0±0.0세, 신장: 168.4±4.7 cm, 질량: 63.8±8.2 kg, 태권도 경력: 13.0±2.1년)이었다. 이들은 지난 6개월 간 부상 경력이 없었으며, 유단자 품새 가운데 고려 품새부터 평원 품새까지 수행하는데 문제가 없었다. 연구대상자에게 실험 목적과 절차에 대해 실험 전에 설명하였고, 참여 동의서에 서명한 자들만 연구에 참여시켰다. 모든 연구 과정은 생명연구윤리위원회 지침과 절차를 따랐다.
2. 측정 장비
동작 측정을 위해 관성센서 2개를 사용하였다. 각 관성센서(Physilog®, Gait-up, Swissland)는 6 자유도 신호(3축 선형 가속도와 3축 각속도)를 측정하였다. 가속도 센서는 최대 16 g (156.8 m/s2), 각속도 센서는 최대 2,000°/s까지 측정할 수 있었다. 관성센서를 연구대상자의 손목(요측과 척측 경상돌기의 중앙)과 발목(외측 복사뼈 위)에 각각 하나씩 부착하여 운동학 자료(취득율 256 Hz)를 획득하였다(Figure 1). 손목 센서는 전완 분절의 각속도와 손목 위치의 가속도를 측정하였고, 발목 센서는 하퇴 분절의 각속도와 복숭아뼈 위치의 가속도를 각각 측정하였다.

3. 실험 절차
실험 전 연구대상자들에게 워밍업 시간(15분)을 주였다. 대상자들은 각자 방식으로 스트레칭 하거나 몸을 풀었다. 이후 연구자는 대상자 팔목과 발목에 각각 관성센서를 부착하였다. 이 위치는 차기, 막기, 찌르기의 태권도 기본 동작을 가장 잘 나타낼 수 있는 부위로 연구자의 판단으로 결정되었다. 준비가 완료되면 고려, 금강, 태백 품새를 임의의 순서에 따라 연구대상자가 2회씩 반복 수행하게 하였다. 첫 번째 수행 후 휴식 시간(5분)을 부여하여, 두 번째 수행에 영향을 줄 수 있는 피로도를 최소화하였다. 다른 품새로 넘어갈 때는 휴식 시간 10분을 부여하였다. 안드로이드계열 테블릿(Galaxy A6, 삼성전자)에 탑재된 업체 제공 소프트웨어를 이용하여 동작 데이터 저장의 시작과 끝, 2개 센서의 시간 동기화를 제어하였다. 품새를 마치면 컴퓨터에 각 센서를 연결하여 저장된 자료를 내려 받았다. 업체가 제공하는 데이터 가시화(visualization) 프로그램을 거쳐 원자료(raw data)는 CSV 파일로 저장되었다. 이후 상용수치해석 프로그램인 Matlab® (ver. 2015b, MathWorks, Inc., USA)에서 자료 후처리와 분석을 실시하였다.
4. 분석 절차와 종속 변수
1) 시계열 일관성(temporal consistency)
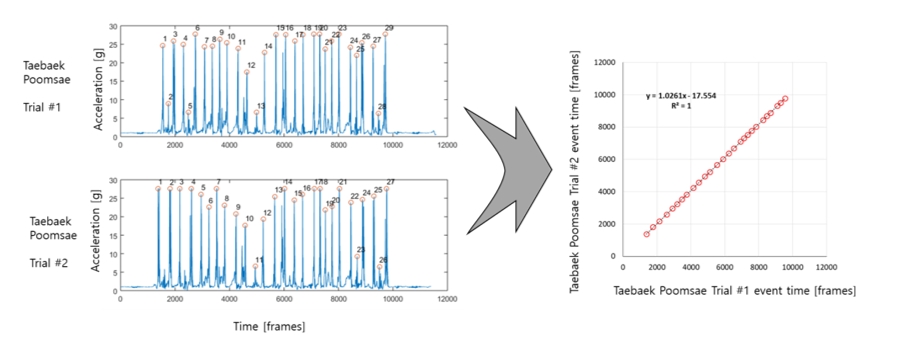
첫 번째 수행과 두 번째 품새 수행의 결과를 비교하려고 Matlab®의 교차상관(cross-correlation) 함수를 이용하여 동작 시간을 동기화 시켰다. 양(+) 또는 음(-)의 시간 프레임에서 양(+)또는 음(-)의 피크상관이 나오는 것을 이용하여 시간차를 계산하였다. 신호들의 시간차(time delay)를 고려했을 때 동일위상(in-phase) 또는 반대위상(anti-phase)의 관계를 나타내었다. 두 신호의 시작 시간을 일치시키면 시계열 관점에서 볼 때 유사한 시간 흐름에서 유사한 신호 패턴이 발생하였다. 이후에 손목 가속도 피크값 발생 시간들을 뽑아낸 후 값을 비교하여 동작의 시계열 일관성(temporal consistency)을 살펴보았다.
1차와 2차 가속도 신호의 피크 시간 프레임들끼리 회귀식(regression equation)을 만들었을 때 나오는 회귀식 기울기(B)와 결정계수(r2, 상관계수 제곱)를 시계열 일관성 지표라고 조작적으로 정의하였다(Figure 2). Figure 2는 한 선수가 태백 품새를 두 차례 수행했을 때 획득한 손목의 합성 가속도(취득율 256 Hz) 예이다. 회귀식 기울기는 1차와 2차 수행에서 전체 동작 시간 일치도를 나타내는 것으로 회귀식 기울기가 1보다 큰 경우는 2차 수행의 가속도 피크 프레임들이 1차 수행보다 늦게 발생하는 것이고, 기울기가 1보다 작은 경우는 일찍 발생한 것을 의미하였다.
동작의 일관성은 다음에 언급하는 2가지 변수로 정의(코사인 유사도와 유클리디안 거리)하고 계산하였다. 동작을 수행하면 손목 센서에서 전완 분절의 3축 각속도를 얻는다. 1차와 2차 시기 결과를 각각의 축(X, Y, Z 축) 별로 데이터를 비교하려면 계산을 3회 해야 한다. 그러나 3차원 각속도 벡터를 구성하여 벡터끼리 비교하면 계산 1회로 끝낼 수 있다. 본 연구에서는 데이터 사이언스 텍스트 마이닝(text mining)의 코사인 유사도(cosine similarity)와 유클리디안 거리(Euclidian distance) 기법을 동작 결과 벡터를 비교하는데 활용하였다(Kim, Kim, Park, Kim & Yu, 2012; Lee & Lee, 2002; Lee, Lee & Lee, 2002).
2) 코사인 유사도(cosine similarity)
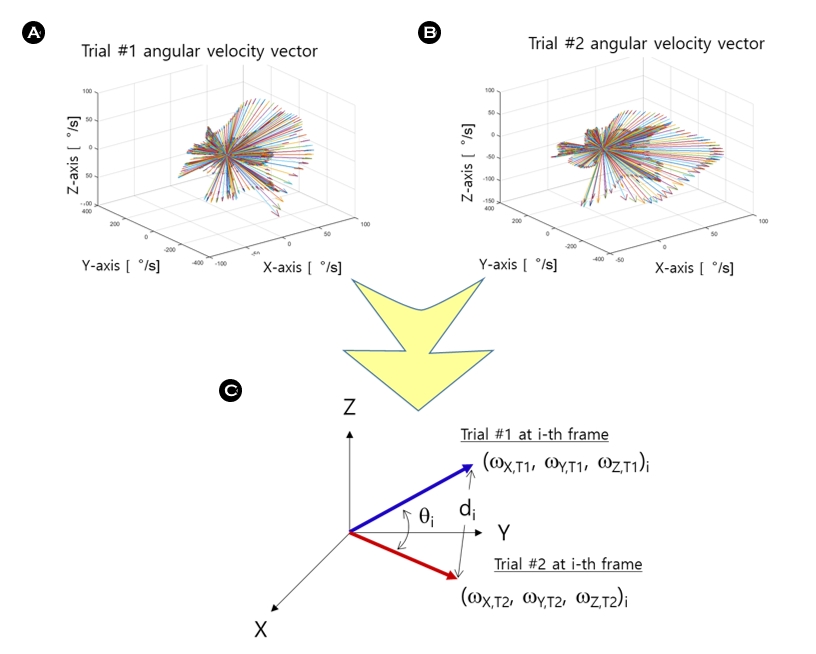
코사인 유사도는 두 벡터 사이에 형성되는 방향 코사인(direction)으로 정의된다(Figure 3(C)). 만약 두 벡터의 방향이 매우 비슷하면 사잇각은 0°에 가까워져 방향 코사인은 1에 가까워진다. 비슷하지 않으면 사잇각은 0°에서 점점 멀어져 방향 코사인은 1보다 작게 된다. 이 개념을 이용하여 첫 번째와 두 번째 수행에서 얻어진 시계열 3차원 각속도 벡터 행렬을 각각 구성하였다. 5,000 프레임으로 1, 2차 각속도 결과를 시간 표준화(time normalization)시킨 후 매 시각 프레임에서 방향 코사인을 연속적으로 구했다. Figure 3(C)에 나타난 두 벡터의 방향 코사인은 다음과 같다.
여기서 T1i과 T2i는 첫 번째 수행(Figure 3(A)의 Trial #1)과 두 번째 수행(Figure 3(B)의 Trial #2)의 i번째 시간 프레임일 때 각속도 벡터이다. 는 3차원 각속도의 벡터 성분이다. 전체 수행 시간에 걸친 방향 코사인 평균값을 코사인 유사도로 정의하였다. 그 값이 1.0에 가까울수록 2회 수행한 품새 동작들은 매우 유사했다는 것을 의미하였다. 1.0보다 작으면 작을수록 2회 수행한 품새 동작의 유사성은 떨어졌다.
3) 유클리디안 거리(Euclidian distance)
2회 실시한 전완 분절 각속도 벡터끼리의 물리적 거리(제곱근 거리)는 다음과 같다.
전체 수행 시간에 걸쳐 di 의 평균값을 유클리디안 거리(di )로 정의하였다. 그 값이 0에 가까울수록 두 벡터의 물리적 거리가 각 프레임에서 매우 작아서 두 벡터는 유사했다는 것을 의미하였다(Kim et al., 2012).
5. 통계 분석
본 연구에 참여한 대상자가 소수여서 데이터의 정규성(normality) 확보가 가능하지 않았다. 따라서 비모수 검정인 Mann-Whitney U test를 실시하여 품새선수 집단과 시범선수 집단의 평균을 비교하였다. 상용 통계 프로그램인 SPSS® (ver. 2019, IBM Incorp.)를 사용하였고, 유의 수준은 0.05으로 설정하였다.
1. 시계열 일관성(temporal consistency)
2회씩 품새를 반복하였을 때, 전체 동작 시간 일치도를 나타내는회귀식 기울기(B)는 유의한 차이가 집단 사이에 없었다. 동작 발생 시점들의 일관성을 나타내는 결정계수(r2, 상관계수의 제곱)는 유의한 차이가 두 집단 사이에 있었다(p<.05, Table 1) 품새선수가 각각 고려 품새(1.000±.0001)와 태백 품새(1.000±.0001)에서 시범선수의 결과(.999±.001와 .999±.001)보다 큰 값을 보였다(p<.05). 금강 품새에서는 집단 간 차이가 없었다.
|
|
B |
|
r2 |
||||
|
Poomsae |
Demontratrion |
p-value |
Poomsae |
Demontratrion |
p-value |
||
|
Goryeo |
1.009±.013 |
.993±.015 |
.222 |
|
1.000±.0001 |
.999±.001 |
.048* |
|
Geumgang |
.999±.020 |
1.038±.117 |
.310 |
|
1.000±.0001 |
.998±.003 |
.079 |
|
Taebaek |
1.021±.009 |
1.007±.050 |
1.000 |
|
1.000±.0001 |
.999±.001 |
.024* |
|
Note. significant at *p<.05 |
|||||||
2. 코사인 유사도(cosine similarity)
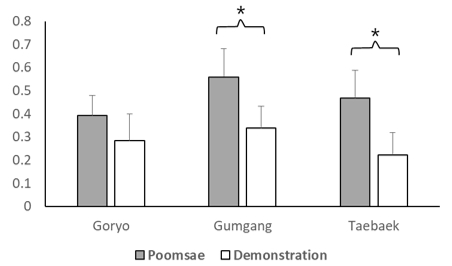
품새 시간을 표준화(time normalization)한 후 살펴본 코사인 유사도는 집단 간 유의한 차이가 금강 품새와 태백 품새에서 나타났다(p<.05, Figure 4). 품새선수는 금강 품새에서 0.560±0.121을 보여주어 시범선수(0.338±0.096)보다 높은 동작 일관성을 보였다(p<.05). 태백 품새에서도 품새선수(0.468±0.121)가 시범선수(0.222±0.096)보다 더 큰 값을 나타냈다(p<.05).
3. 유클리디안 거리(Euclidian distance)
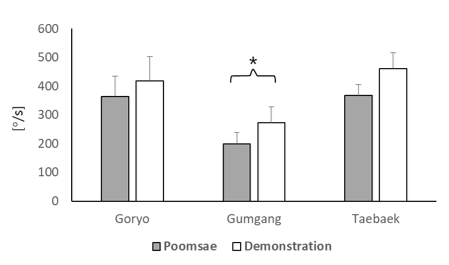
또 다른 일관성 지표인 유클리디안 거리(Euclidian distance)는 유의한 평균 차이가 금강 품새에서만 발생하였다(p<.05, Figure 5). 품새선수의 유클리디안 거리(198.7±39.4°/s)는 시범선수의 거리(272.7±55.5°/s)보다 유의하게 짧았다(p<.05). 고려 품새와 태백 품새에서도 품새선수들의 유클리디안 거리 평균은 짧았으나 통계적 차이를 보이지 못했다.
관성센서를 사용하여 태권도 품새 동작을 정량적으로 평가하고자 본 연구를 진행하였다. 대학 품새선수(5명)와 시범선수(5명)들에게 각각 3가지 유단자 품새인 고려, 금강, 태백 품새를 하게 하였고, 관성센서를 손목과 발목에 부착시켜 품새 중에 발생하는 가속도와 각속도 자료를 획득하였다. 이후 신호처리 과정을 거치고 데이터 마이닝에서 사용하였던 코사인 유사도와 유클리디안 거리 방법을 채용하였다. 품새 동작이라는 시계열 벡터 행렬을 생성해 놓고, 구분되는 동작 신호로 파악되는 신호의 피크값 일치도를 시계열 일관성이라는 조작적 변수로 평가하였다. 또한, 시간에 따라 변화하는 벡터들의 방향과 크기 차이를 파악한 동작의 일관성 지표들도 정량화하고, 두 집단 간 차이를 통계적으로 살펴 보았다.
유단자 품새는 규정 품새로 태권도 교본에 품새의 진행선과 요구되는 동작들이 기술되어 있다. 따라서 품새는 정량화하고 표준화할 수 있는 동작의 집합체로 볼 수 있다. 본 연구 결과 품새선수 경기력이 시범선수보다 월등히 우수하였다. 시범선수도 10년 이상의 태권도 경력과 4단 이상의 유단자이지만, 품새선수가 지닌 시계열과 동작의 일관성에는 일부 미치지 못했다. 시계열 일관성 지표들을 보면 품새선수는 시범선수들보다 고려 품새와 태백 품새에서 더 우수한 일관성을 보였다. 그러나 금강품 새에서는 두 집단 간에 통계적인 차이가 없었다. 이는 금강 품새에 내재된 학다리서리 동작 때문이라고 생각한다(Kim, 2021; Ryu et al., 2021). 금강 품새에서 학다리서기 동작은 4회 실시하게 된다. 이 동작은 천천히 실시하면서 힘을 짜낸다. 다른 동작에 비해 매우 느리기 때문에 개인마다 동작 시간과 템포의 편차가 쉽게 발생한다. 이러한 이유 때문에 개인 내에서도 시간 일관성이 떨어지고 두 집단 사이에 유의한 차이를 나타나지 못한 것으로 생각되었다.
본 연구에서 활용한 코사인 유사도 기법은 논문 유사도를 판별하는 텍스트 마이닝 기법의 일종이다(Lee & Lee, 2002; Lee et al., 2002). 한 벡터와 다른 벡터가 서로 유사성이 있으면 방향 코사인(direction cosine)은 1에 가까워 진다. 최근 Lee와 Kim (2021)은 댄스 스포츠에서 남녀 커플 동작의 협응 일관성을 파악하기 위해 남녀 골반 각속도를 합쳐 6차원 벡터를 생성한 후 이 방법을 적용하여 커플의 실력을 비교하였다. 그 결과 코사인 유사도와 커플의 랭킹 사이에 유사한 상관이 있음을 보였다. 방향 코사인이 1이면 두 벡터 사잇각이 0°가 되어 완벽한 방향 일치를 나타내고, 1보다 작을수록 벡터끼리 방향은 벌어진다.
인체의 움직임은 3차원 공간 상에서 발생한다. 품새에서 전완 움직임은 3차원 각속도를 만들어내고, 매 순간 하나의 합성 벡터 방향을 생성한다. 품새 동작의 일관성이 좋다면 반복하여 품새할 때 특정 동작 순간마다 유사한 각속도 벡터(크기와 방향)를 만들어 낼 것이다. 이것은 수련생이 부단한 연습을 통해서 동작을 반복해 낼 수 있는 고유수용감각의 향상으로도 해석할 수 있다. 재현 능력이 좋다면 운동학적으로 발생하는 두 동작의 각속도 벡터들 사이에 1에 가까운 방향 코사인과 0에 가까운 유클리디안 거리가 나올 것이다. 한편, 3차원 각속도에서 특정한 축 방향으로 각속도가 빨라지거나 느려지면 이전에 수행했던 결과와 비교할 때 방향 코사인은 1보다 작아지고 유클리디안 거리는 길어지게 된다.
코사인 유사도를 살펴본 결과 금강 품새와 태백 품새에서 집단 간에 차이가 뚜렸했다. 품새선수가 시범선수보다 동작의 템포와 함께 동작의 각속도 생성을 일관성 있게 가져갔다. 한편, 고려 품새에서는 코사인 유사도 차이가 없었다. 이것은 모든 유단자들이 수련 과정에서 고려 품새를 가장 많이 연습하기 때문에 시범선수도 품새선수 못지 않은 동작의 일관성을 보여주었기 때문이라고 생각했다. 그러나, 단순함이 반복되는 금강 품새와 쉬어가는 동작없이 연속되는 동작의 태백 품새는 품새선수가 월등히 뛰어난 수행 능력을 보여주었다.
품새 동작의 일관성을 보여주는 또 하나인 유클리디안 거리에서도 품새선수가 시범선수보다 우수한 능력을 보여 주었다. 금강 품새에서만 통계적으로 유의한 차이가 발생했다. 이것은 다른 품새와 달리 금강 품새는 빠른 동작보다는 반복적인 단순 동작(학디리서기, 돌쪄기, 산틀막기 등)이 많이 들어있는 것이 일부 원인이라고 생각되었다. 즉, 두 집단 선수들 모두 태권도 수준이 매우 높기 때문에 빠른 동작에서는 각속도 재현 능력에서 차이가 없을 것으로 생각되고, 매우 느리거나 힘을 짜내는 동작에서 차이가 날 것으로 생각된다. 따라서, 금강 품새에서는 매우 빠른 동작의 빈도가 적기 때문에 더 많은 연습을 한 품새선수가 더 세밀한 각속도 재현 능력을 몸에 체득했을 것으로 생각된다. 코사인 유사도와 유클리디안 거리 모두의 결과로 볼 때 금강 품새는 유단자의 실력 차를 확실히 구분할 수 있는 품새라고 생각된다. 태백 품새는 3단이 하는 품새여서 반복 훈련 빈도가 앞서 언급한 고려 품새나 금강 품새보다 떨어졌을 것이고, 품새 동작 구성에 빠른 손동작(양손 몸통지르기)이 반복된다. 이에 따라, 두 집단 사이에 동작을 수행할 때 각속도 크기(유클리디안 거리)는 차별되지 않았으나 각속도 방향의 일관성(코사인 유사도)은 유의하게 차이가 났다.
본 연구도 몇 가지 한계점을 가지고 있다. 충격이 강한 발 동작을 할 때는 가속도 값이 매우 커서 신호 절단(chopping) 현상이 발생하곤 하였다. 빠르고 강력한 태권도 동작에 관성센서를 적극적으로 활용하려면 큰 가속도를 측정할 수 있는 센서가 필요하다. 신호처리와 지표를 도출하는 과정에서 연구자가 코딩 로직을 개인의 자료 특성에 따라 수정해야 하는 상황들이 발생하였다. 일괄처리(batch processing)를 통한 자동화는 아직까지 한계점이 있다. 따라서, 전자 채점 시스템으로 가려면 이러한 기술적인 한계점들을 극복해야만 하겠다. 쉽게 측정할 수 있는 관성센서의 장점을 이용하여 다양한 연령대와 수준에 따라 품새 빅테이터를 구축한다면 향후에 최적화된 품새 동작 모델을 도출할 수 있고, 인공지능 기술을 활용하여 개인맞춤형 피드백 체계도 구축할 수 있을 것으로 생각한다. 그러면 심판의 주관적인 판단으로만 점수를 주는 품새 경기도 객관성을 확보하는 전자채점화의 길에 다가 설 것이다.
본 연구는 관성센서를 이용하여 태권도 품새 동작을 측정하고, 분석 결과를 바탕으로 품새 경기력을 평가하는 도구로서 타당성이 있음을 파악하였다. 관성센서는 신호처리 기법들(시계열 일관성, 코사인 유사도, 유클리디안 거리)과 접목했을 때 품새선수와 시범선수의 경기력을 구분할 수 있었고, 각 품새가 지닌 시공간적 특성들도 파악할 수 있었다. 품새 빅데이터가 쌓이고, 신호처리 로직이 자동화된다면 품새의 전자채점화는 한 걸음 앞당겨질 것으로 생각한다.
References
1. Cho, J. S., Kang, S. I., Lee, K. H., Jang, S. H., Kim, I. Y. & Lee, J. S. (2015). Implementation of gait analysis system based on inertial sensors. Journal of Rehabilitation Welfare Engineering & Assistive Technology, 9(2), 137-144.
Google Scholar
2. Fusca, M., Negrini, F., Perego, P., Magoni, L., Molteni, F. & Andreoni, G. (2018). Validation of a wearable IMU system for gait analysis: Protocol and application to a new system. Applied Sciences, 8, 1167-1182.
Google Scholar
3. Kim, G. Y., Kim, J. H., Park, J. S., Kim, H. T. & Yu, Y. S. (2012). Vehicle Tracking using Euclidean Distance. The Journal of the Korea Institute of Electronic Communication Sciences, 7(6), 1293-1299.
Google Scholar
4. Kim, Y. K. (2020). Comparative analysis of the temporal consistency of Taekwondo Keumgang Poomsae between Taekwondo athletes in terms of inertial measurement unit sensor. Korean Journal of Sports Science, 29(1), 763-772.
5. Ko, K. R. & Pan, S. B. (2018). Golf swing motion analysis based on inertial sensors. Journal of Korean Institute of Information Tech- nology, 16(1), 125-131.
6. Kukkickwon (2006). The manual of Taekwondo. Oh-sung: Seoul.
7. Lee, J. W. & Lee, K.H. (2002). XML document analysis based on similarity. Journal of Korean Institute of Information Scientists and Engineers: Software and Applications, 29(6), 367-376.
Google Scholar
8. Lee, J. W. Lee, H. S. & Lee, K. H. (2002). Similarity checking between XML tags through expanding synonym vector. Journal of Korean Institute of Information Scientists and Engineers: Software and Applications, 29(9), 676-683.
Google Scholar
9. Lee, S. B. (2009). Analysis of physical activities during Poomsae per- formance by using inertial sensors. Unpulished doctoral dissertation. Choongbuk University.
10. Lee, S. H. & Park, J. B. (2007). The recognition survey about Poomsae-coach & player's referee-judgement for fairness betterment of taekwondo poomsae's refree. Korean Sports Research, 18(4), 831-842.
11. Lee, W. J. & Kim, Y. K. (2021). Analysis of the consistency of dance couple motions in terms of inertial sensor signals. Journal of Korean Society of Dance Science, 38(2), 49-63.
12. Ryu, J. S., Ryu, S. H., Park, S. K. & Yoon, S. H. (2012). Comparisons between skilled and less-skilled players' balance in Hakdariseogi. Korean Journal of Sport Biomechanics, 22(1), 55-63.
Google Scholar
13. Ryu, S. H. (2020). Injury prevention strategies of landing motion of jumping front kick to apply free style Poomsae of Taekwondo, Korean Journal of Sport Biomechanics, 30(1), 37-49.
Google Scholar
14. Seel, T., Raisch, J. & Schauer, T. (2014). IMU-based joint angle meas- urement for gait analysis. Sensors, 14, 6891-6909.
Google Scholar
15. So, J. M., Kang, S. S., Hong, A., Jung, J. M. & Kim, J. J. (2016). Kinematic characteristics based on proficiency In Geoduepyeopchagi in Taekwondo Poomsae Koryo. Korean Journal of Sport Biomechanics, 26(4), 343-351.
Google Scholar
