Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Jiyoung Jeong
Choongsoo S. Shin
http://dx.doi.org/10.5103/KJSB.2016.26.2.161 Epub 2016 July 14
Abstract
Objective: The purpose of this study was to determine the knee and ankle joint kinematics and kinetics by comparing downhill walking with valley-shape combined slope walking.
Method: Eighteen healthy men participated in this study. A three-dimensional motion capture system equipped with eight infrared cameras and a synchronized force plate, which was embedded in the sloped walkway, was used. Obtained kinematic and kinetic parameters were compared using paired two-tailed Student's t-tests at a significance level of 0.05.
Results: The knee flexion angle after the mid-stance phase, the mean peak knee flexion angle in the early swing phase, and the ankle mean peak dorsiflexion angle were greater during downhill walking compared with valley-shape combined slope walking (p < 0.001). Both the mean peak vertical ground reaction force (GRF) in the early stance phase and late stance phase during downhill walking were smaller than those values during valley-shape combined slope walking. (p = 0.007 and p < 0.001, respectively). The mean peak anterior GRF, appearing right after toe-off during downhill walking, was also smaller than that of valley-shape combined slope walking (p = 0.002). The mean peak knee extension moment and ankle plantar flexion moment in late stance phase during downhill walking were significantly smaller than those of valley-shape combined slope walking (p = 0.002 and p = 0.015, respectively).
Conclusion: These results suggest that gait strategy was modified during valley-shape combined slope walking when compared with continuous downhill walking in order to gain the propulsion for lifting the body up the incline for foot clearance.
Keywords
Downhill walking Valley-shape combined slope walking Kinematics Kinetics Lower extremity
As a part of recent efforts to enjoy a higher quality of life, interest in health has been growing, and so has the time that is invested in leisure and recreation. In particular, one of Korea's geographical merits is the large number of mountainous regions, which has made moun- tain hiking a popular leisure activity, with 4.62 million people known to participate in mountain hiking each year (Korea Forest Service [KFS], 2007). Because a gait during mountain hiking takes place on various slopes, more muscles are utilized than in flat walking (Lay, Hass, Richard Nichols, & Gregor, 2007), so it helps to strengthen muscles. However, in a survey of mountain hikers conducted by Boulware, Forgey, and Martin (2003) to ascertain the extent of injuries that can occur during outdoor activities, 36% of subjects reported acute joint pain, and 24% had experienced muscle or ankle sprains. A previous study reported that the anterior forces on the knee joint are larger when walking downhill compared with flat walking, resulting in a greater load on the anterior cruciate ligament (Kuster, Sakurai, & Wood, 1995). Moreover, musculo- skeletal injuries occur frequently during military training in mountain areas, with the majority being lower limb injuries (Kaufman, Brodine, & Shaffer, 2000).
To date, there have been various studies on joint kinetics and kine- matics during walking on either uphill or downhill slopes (Kuster et al., 1995; Redfern & DiPasquale, 1997; Lay, Hass, & Gregor, 2006; Wannop, Worobets, Ruiz, & Stefanyshyn, 2014). Previous studies have reported that the kinetic and kinematic parameters of the joints change when walking on a slope; compared with flat walking, walking on an uphill slope produces a greater anterior ground reaction force (GRF) and greater plantar flexion moment and dorsiflexion angle in the ankle during the late stance phase, in order to secure enough space for the heel to land and to pull the body up the slope (Lay et al., 2006; Redfern & DiPasquale, 1997). Walking on a downhill slope produces a greater posterior GRF and extension moment of the knee, in order to balance the body as it gets lower (Lay et al., 2006; Kuster et al., 1995; Redfern & DiPasquale, 1997). Meanwhile, Sheehan and Gottschall (2011) studied spatiotemporal gait parameters when changing terrain from flat to stairs or vice versa, and found that the shape of the terrain on the next step altered spatiotemporal gait parameters, thereby influencing the risk of a fall.
Actual mountainous terrain does not consist of only downhill or only uphill slopes, but rather a mixture of the two. To date, however, kinetic and kinematic data have only been reported separately for downhill and uphill slopes at different angles, and there has been almost no analysis of gait on combined uphill and downhill slopes (V-shaped combined slopes). As a change in terrain causes the gait strategy to change as well, and, as seen in the study by Sheehan and Gottschall (2011), joint kinetics and kinematics, including spatiotemporal gait para- meters, change according to the shape of terrain for the next step, different gait characteristics can be predicted when going from a down- hill to an uphill slope compared with continued downhill walking. There- fore, this study aimed to examine knee and ankle joint kinetics and kinematics, as a measure of gait characteristics, on a valley-shaped slope combining uphill and downhill regions, intended to simulate rough, mountainous terrain in a laboratory environment. These results were then compared with downhill walking. We hypothesized that, relative to downhill walking, combined slope walking would show increased peak knee flexion angle, peak knee extension moment, peak ankle dor- siflexion angle, peak ankle plantar flexion moment, and anterior GRF.
1. Research subjects
The subjects for this study consisted of 18 healthy, adult, Korean men (age: 22.8 ± 2.5 years, height: 173.8 ± 3.4 cm, weight: 66.5 ± 5.3 kg, BMI: 22.0 ± 1.9 kg/m2). Individuals with a history of musculoskeletal disease or signs of such a disease were excluded from this study. Prior to the experiment, the study was assessed by the Sogang University Ethical Review Board, and consent was obtained from all subjects.
2. Experimental procedure
A three-dimensional movement analysis system consisting of 8 in- frared cameras (Eagle; Motion Analysis Inc., Santa Rosa, CA, USA) was used to measure gait movements on the valley-shaped slope at a sampling rate of 200 Hz, and to obtain kinetic and kinematic data for the lower limb. Reflective markers, 12.5 mm in diameter, were affixed to the following anatomical positions: the anterior superior iliac spines, sacrum, greater trochanter, midpoint of femur, medial and lateral epi- condyles of the femur, medial and lateral plateau of tibia, midpoint of the tibia, medial and lateral malleolus, calcaneus, and the first and fifth metatarsal heads. All subjects wore shoes; in order to measure foot movements precisely, holes were made in the shoes and the reflective markers were affixed directly to the foot at key locations (medial and lateral malleolus, calcaneus, and the first and fifth metatarsal heads). A force plate (9260AA6; Kistler, Winterthur, Switzerland) was synchronized with the movement analysis system and inserted beneath the slope, taking measurements at a sampling rate of 1,200 Hz.
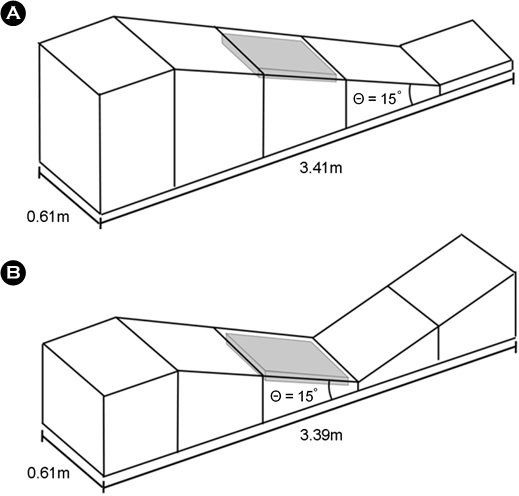
We manufactured a 15° downhill slope and a combined slope, con- sisting of a 15° downhill followed by an uphill slope (Figure 1). Before starting the experiment, the subjects practiced walking on the slopes several times at a comfortable pace, in order to become familiar with the movements. When walking on the slopes, all subjects stepped on the force plate with their dominant foot, and data were only analyzed when the whole foot made contact with the force plate.
3. Data analysis
A single gait cycle was defined as a period from one heel strike to the next heel strike of the same foot. Heel strike was defined as the time when vertical GRF exceeded 20 N. Noise was removed from the kinetic and kinematic data using a 4th order Butterworth low-pass filter with a cut-off frequency of 10 Hz. In order to calculate movements of the joints, anatomical coordinate systems were defined for segments of the body other than the foot, using the method proposed by Dyrby and Andriacchi (2004). The coordinate system for the foot was defined using a new method proposed by Hong and Shin (2015). The supero- inferior axis of the foot coordinate system was defined as a vector passing through the calcaneus, perpendicular to the plane containing the calcaneus and the first and fifth metatarsals. The mediolateral axis was the cross product of the superoinferior axis and the vector joining the calcaneus and the midpoint of the medial and lateral malleoli. The anteroposterior axis was the cross product of the mediolateral and superoinferior axes. Here, the coordinates for GRF were oriented such that the superior direction was +Z, the anterior direction was +Y, and the cross product of the +Z and +Y axes was +X. The local coordinate system was defined so that, for the right foot, the inferior direction was +Z, the anterior direction was +Y, and the medial direction was +X. Joint moment was calculated by obtaining an inverse dynamic solution via the Newton-Euler equations (Winter, Patla, Frank, & Walt, 1990). The stance phase was determined using the GRF, based on the timing of the heel strike and toe off. Joint moment was normalized by each subject's height and weight, and GRF data was normalized by weight (Favre, Hayoz, Erhart-Hledik, & Andriacchi, 2012).
|
|
Phase |
Downhill |
Valley-shaped |
|
Peak knee flexion (+)/extension (-) angle (deg) |
First
half of stance (KA1) |
39.2 ± 3.8 |
41.7 ± 3.9 |
|
Second half of stance (KA2) |
NA |
31.0 ± 5.3 |
|
|
Swing (KA3) |
91.5 ± 8.4* |
78.6 ± 4.6* |
|
|
Peak ankle plantar (+)/dorsi (-)flexion angle (deg) |
First
half of stance (AA1) |
10.1 ± 2.9 |
10.8 ± 2.4 |
|
Second half of stance (AA2) |
-29.8 ± 5.0* |
-15.4 ± 2.9* |
|
|
Swing (AA3) |
-6.8 ± 3.6* |
9.8 ± 3.5* |
|
|
Peak anterior (+)/posterior (-) GRF (N/BW) |
First
half of stance (AF1) |
-0.39 ± 0.05 |
-0.43 ± 0.07 |
|
Second half of stance (AF2) |
0.01 ± 0.03* |
0.04 ± 0.02* |
|
|
Peak vertical (+) GRF (N/BW) |
First
half of stance (VF1) |
1.19 ± 0.14* |
1.28 ± 0.12* |
|
Second half of stance (VF2) |
1.01 ± 0.14* |
1.18 ± 0.15* |
|
|
Peak knee flexion (+)/extension (-) moment |
First
half of stance (KM1) |
-0.09 ± 0.02 |
-0.09 ± 0.02 |
|
Second half of stance (KM2) |
-0.07 ± 0.02* |
-0.04 ± 0.03* |
|
|
Peak ankle plantar (+)/dorsi (-)flexion moment (Nm/(BW × height)) |
First
half of stance (AM1) |
-0.02 ± 0.01* |
-0.01 ± 0.01* |
|
Second half of stance (AM2) |
0.10 ± 0.01* |
0.11 ± 0.01* |
4. Statistical analysis
To identify differences in gait characteristics between downhill walking and valley-shaped slope walking, MATLAB (Version R2014b, The Math- works, Natick, MA, USA) was used to perform two-tailed paired-sample t-tests (significance level = 0.05) to compare kinetic and kinematic data from the joints of the lower limb during the two different conditions.
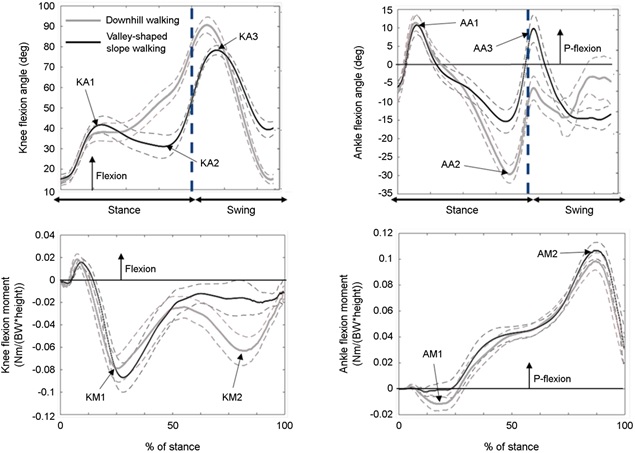
When walking on the valley-shaped slope, the walking speed was significantly higher than in downhill walking (downhill: 1.19 ± 0.49 m/s, valley-shaped: 1.48 ± 0.40 m/s, p = 0.004). In the second half of the stance phase, the knee flexion angle decreased on the valley-shaped slope, and showed a smaller peak knee flexion angle than in the down- hill slope in the swing phase (p < 0.001, Table 1, Figure 2). For both conditions, the ankle joint showed its peak plantar flexion angle in the first half of the stance phase, followed by continual dorsiflexion. Here, walking the valley-shaped slope showed a small peak dorsiflexion angle in the second half of the stance phase compared with walking on the downhill slope (p < 0.001, Table 1, Figure 2). In the swing phase, valley¬shaped slope walking showed ankle plantarflexion, while the downhill slope walking showed dorsiflexion.
During walking on the valley-shaped slope, the extension moment of knee during the overall stance phase did not show any difference compared with downhill walking, but showed a significant decrease compared to downhill walking in the second half of the stance phase (p = 0.001, Table 1, Figure 2). The plantar flexion moment of ankle was significantly larger for the valley-shaped slope than for the downhill slope (p = 0.008, Table 1, Figure 2).
The asterisk (*) represents a significant difference between downhill and valley-shaped slope walking at a 95% confidence level. As the peak knee flexion angle in late stance phase during downhill walking was not observed, no value is included in the table. KA, AA, AF, VF, KM, and AM indicate knee angle, ankle angle, anterior/posterior GRF, vertical GRF, knee moment, and ankle moment, respectively, as indicated in Figure 2.
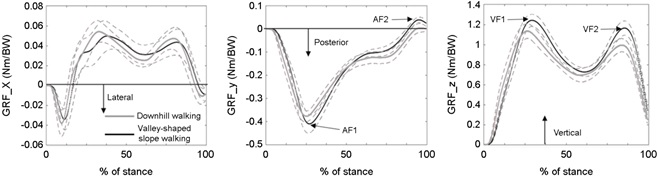
There was no difference in mediolateral GRF between valley-shaped slope walking and downhill walking. Although there was no difference in posterior GRF between the two types of slope in the first half of the stance phase, valley-shaped slope walking showed a greater anterior GRF than did downhill walking immediately before toe-off (p = 0.001, Table 1, Figure 3). Vertical GRF showed a statistically significant increase of 7% and 16%, respectively, in the first half and second half of the stance phase for valley-shaped slope walking, compared with downhill walking (p = 0.004, p < 0.001, Table 1, Figure 3).
Taking into account the large amount of mountainous terrain in South Korea, this study aimed to compare the lower limb kinetics and kinematics when walking on both a downhill slope and a valley-shaped slope that simulates mountainous terrain in a laboratory environment, and thereby to analyze how the gait strategies change according to topology. The results showed differences in knee flexion angle, exten- sion moment, ankle dorsiflexion angle, and plantar flexion moment in the second half of the stance phase, as well as a difference in anterior GRF immediately before toe-off. These differences in kinetic and kine- matic characteristics demonstrate that subjects selected a different gait strategy for valley-shaped slope walking compared with downhill walking.
In this study, valley-shaped slope walking showed a small knee flexion angle and an extension moment in the second half of the stance phase compared with downhill walking. In a study by Kuster et al. (1995) com- paring downhill walking with flat walking, the knee flexion angle was larger in downhill walking, and this was reported to be because the opposite foot needed to land lower down in the swing phase. Con- versely, in valley-shaped slope walking, it is thought that the knee flexion angle was smaller because the opposite foot needed to step on elevated terrain immediately after downhill walking. At the ankle, the peak plantar flexion angle was seen in the first half of the stance phase for both types of walking, after which the ankle showed continual dor- siflexion. Here, the angle of dorsiflexion in the second half of the stance phase was smaller for valley-shaped slope walking than for downhill walking, meaning that the ankle ROM was larger for downhill walking. In previous studies, dorsiflexion ROM of the ankle was an important parameter in predicting overuse injury of the Achilles tendon, and risk of injury was reported in movements with a dorsiflexion angle greater than 9° (Mahieu, Witvrouw, Stevens, Van Tiggelen, & Roget, 2006). In addition, another study reported that when ankle ROM increases, ten- sion due to sudden eccentric contraction of the gastrocnemius could cause injury (Song, Nakazato, & Nakajima, 2004). Therefore, when con- tinually walking downhill, the increased dorsiflexion ROM of the ankle could increase the risk of injury to the Achilles tendon and gastroc- nemius.
Compared with downhill walking, valley-shaped slope walking showed a larger vertical GRF in the second half of the stance phase, and a larger anterior GRF immediately before toe-off. In a study by Gottschall and Kram (2005) comparing GRF when running on slopes, the anterior GRF in the second half of the stance phase was higher for uphill slopes than for flat paths or downhill slopes. Therefore, for valley-shaped slope walking, the larger anterior GRF before toe-off and the larger peak vertical GRF in the second half of stance phase are thought to result from the need for greater thrust, in order to lift the body against gravity to go uphill again after a downhill slope. This differs from down- hill walking, where the center of weight continues to move downwards, and there is no need to lift the body. The peak vertical GRF in the first half of the stance phase is affected by knee flexion angle and walking speed, and previous studies have shown that an increase in the knee flexion angle led to a decrease in the impact transferred to the head, which is equivalent to the peak vertical GRF in the first half of the stance phase (McMahon, Valiant, & Frederick, 1985). Meanwhile, when walking speed is increased, the peak vertical GRF in the first half of the stance phase is reported to increase linearly (Nilsson & Thorstensson, 1989; Keller, Weisberger, Ray, Hasan, Shiavi, & Spengler, 1996). In this study, there was no difference between the two slope types in knee flexion angle in the first half of the stance phase, and so it seemed that a faster walking speed during valley-shaped slope walking must have caused the significant increase in peak vertical GRF. Hreljac, Marshall, and Hume (2000) reported that the vertical GRF in the first half of the stance phase during running was significantly greater for injured athletes than that for healthy athletes, and this parameter was related to overuse injuries, such as Achilles tendon pain and anterior knee pain. Therefore, it is thought that people who have had injuries should be able to reduce the risk of further injury by adjusting walking speed on valley-shaped slopes, to reduce the impact caused by the vertical GRF in the first half of the stance phase.
In the second half of the stance phase, valley-shaped slope walking showed a greater plantar flexion moment in the ankle than in downhill walking. According to previous studies, during the second half of the stance phase in uphill walking, muscle activity in the medial gastroc- nemius and soleus increase relative to the tibialis anterior, and this causes an increase in the plantar flexion moment (Lay et al., 2007). Moreover, the plantar flexors of the ankle are known to be an important parameter contributing to propulsion (Winter, 1983). Therefore, during valley-shaped slope walking where the next step is on an uphill slope, it is thought that muscle activity in the gastrocnemius and soleus would have increased in the second half of the stance phase, and that the increased plantar flexion moment is a result of this increased activity in ankle plantar flexors in order to provide propulsion to lift the body.
As this study was conducted on healthy adult men in their 20s, the result cannot be generalized. Gait characteristics vary with age and sex, and so future studies will be required in male and female subjects in different age groups.
This study aimed to ascertain gait characteristics on valley-shaped slopes by comparing the knee and ankle kinetics and kinematics during valley-shaped slope walking with downhill walking. Unlike down- hill slopes, where the center of weight moves continually downward and there is no need to lift the body, valley-shaped slopes involve walking uphill immediately after a downhill, and so a larger thrust is required to lift the body against gravity. Because of this, it seems that valley-shaped slope walking showed greater anterior GRF, vertical GRF, and ankle plantar flexion moment in the second half of the stance phase. Meanwhile, the large dorsiflexion ROM in the ankle shown by downhill walking in the second half of the stance phase could increase the risk of injury to the Achilles tendon or gastrocnemius.
References
1. Boulware, D., Forgey, W. & Martin, W. (2003). Medical risks of wilderness hiking. The American Journal of Medicine, 114(4), 288-293.
Crossref
Google Scholar
PubMed
2. Dyrby, C. O. & Andriacchi, T. P. (2004). Secondary motions of the knee during weight bearing and non-weight bearing activities. Journal of Orthopaedic Research, 22(4), 794-800.
Crossref
Google Scholar
PubMed
3. Favre, J., Hayoz, M., Erhart-Hledik, J. C. & Andriacchi, T. P. (2012). A neural network model to predict knee adduction moment during walking based on ground reaction force and anthropometric measurements. Journal of Biomechanics, 45(4), 692-698.
Crossref
Google Scholar
4. Gottschall, J. S. & Kram, R. (2005). Ground reaction forces during down- hill and uphill running. Journal of Biomechanics, 38(3), 445-452.
Crossref
Google Scholar
PubMed
5. Hong, Y. N. & Shin, C. S. (2015). Gender differences of sagittal knee and ankle biomechanics during stair-to-ground descent transition. Clinical Biomechanics, 30(10), 1210-1217.
Crossref
Google Scholar
6. Hreljac, A., Marshall, R. N. & Hume, P. A. (2000). Evaluation of lower extremity overuse injury potential in runners. Medicine and Science in Sports and Exercise, 32(9), 1635-1641.
Crossref
Google Scholar
PubMed
7. Kaufman, K. R., Brodine, S. & Shaffer, R. (2000). Military training-related injuries - Surveillance, research, and prevention. American Journal of Preventive Medicine, 18(3), 54-63.
Crossref
Google Scholar
8. Keller, T. S., Weisberger, A. M., Ray, J. L., Hasan, S. S., Shiavi, R. G. & Spengler, D. M. (1996). Relationship between vertical ground re- action force and speed during walking, slow jogging, and running. Clinical Biomechanics, 11(5), 253-259.
Crossref
Google Scholar
9. Korea Forest Service [KFS] (2007) Mountain Climbing Support Plan 2007~2017, 11.
Crossref
10. Kuster, M., Sakurai, S. & Wood, G. A. (1995). Kinematic and kinetic comparison of downhill and level walking. Clinical Biomechanics, 10(2), 79-84.
Crossref
Google Scholar
PubMed
11. Lay, A. N., Hass, C. J. & Gregor, R. J. (2006). The effects of sloped sur- faces on locomotion: A kinematic and kinetic analysis. Journal of Biomechanics, 39(9), 1621-1628.
Crossref
Google Scholar
PubMed
12. Lay, A. N., Hass, C. J., Richard Nichols, T. & Gregor, R. J. (2007). The effects of sloped surfaces on locomotion: an electromyographic analysis. Journal of Biomechanics, 40(6), 1276-1285.
Crossref
Google Scholar
PubMed
13. Mahieu, N. N., Witvrouw, E., Stevens, V., Van Tiggelen, D. & Roget, P. (2006). Intrinsic risk factors for the development of achilles tendon overuse injury: a prospective study. The American Journal of Sports Medicine, 34(2), 226-235.
Crossref
Google Scholar
14. McMahon, T. A., Valiant, G. & Frederick, E. C. (1985). Groucho running. Journal of Applied Physiology, 62(6), 2326-2337.
Crossref
Google Scholar
PubMed
15. Nilsson, J. & Thorstensson, A. (1989). Ground reaction forces at dif- ferent speeds of human walking and running. Acta Physioloica Scandinavica, 136(2), 217-227.
Crossref
Google Scholar
PubMed
16. Redfern, M. S. & DiPasquale, J. (1997). Biomechanics of descending ramps. Gait & Posture, 6(2), 119-125.
Crossref
Google Scholar
17. Sheehan, R. C. & Gottschall, J. S. (2011). Stair walking transitions are an anticipation of the next stride. Journal of Electromyography and Kinesiology, 21(3), 533-541.
Crossref
Google Scholar
PubMed
18. Song, H., Nakazato, K. & Nakajima, H. (2004). Effect of increased ex- cursion of the ankle on the severity of acute eccentric contraction-induced strain injury in the gastrocnemius. The American Journal of Sports Medicine, 32(5), 1263-1269.
Crossref
Google Scholar
19. Wannop, J. W., Worobets, J. T., Ruiz, R. & Stefanyshyn, D. J. (2014). Foot- wear traction and three-dimensional kinematics of level, downhill, uphill and cross-slope walking. Gait & Posture, 40(1), 118-122.
Crossref
Google Scholar
20. Winter, D. A. (1983). Energy generation and absorption at the ankle and knee during fast, natural, and slow cadences. Clinical Orthopaedics Related Research, 175, 147-154.
Crossref
Google Scholar
PubMed
21. Winter, D. A., Patla, A. E., Frank, J. S. & Walt, S. E. (1990). Biomechanical walking pattern changes in the fit and healthy elderly. Physical Therapy, 70(6), 340-347.
Crossref
Google Scholar
PubMed
