Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Kitae Kim
Junkyung Song
Jaebum Park
http://dx.doi.org/10.5103/KJSB.2020.30.2.131 Epub 2020 July 08
Abstract
Objective: The purpose of this study was to examine the effect of degrees of freedom on the multi-synergies in two hierarchies of human hand system during force production and releasing tasks.
Method: In this study, the constrained movements of the aiming and releasing actions using both hands and fingers during archery-like shooting were implemented as experimental tasks. The participants produced a pulling force holding the customized frame (mimicking an archery bow, with a set of force transducers) and kept it consistently for about 5 seconds, and released fingers as quickly as possible in a self-paced manner within the next 5 seconds. An analytical method based on the uncontrolled manifold hypothesis was used to quantify the stability index (synergy index) in two hierarchies including two hands (upper hierarchy) and individual fingers (lower hierarchy).
Results: The results confirmed that the positive synergy pattern showed simultaneously at the upper and lower hierarchies, and the kinetic degrees of freedom were associated with the increment of hierarchical synergy indices and the performance indices. Also, the synergy indices of both hierarchies showed significant positive correlations with the performance accuracy during the task.
Conclusion: The results of this study suggest that the human control system actively uses extra degrees of freedom to stabilize task performance variables. Further increasing the degree of freedom at one level of hierarchy induces positive interactions across hierarchical control levels, which in turn positively affects the accuracy and precision of task performance.
Keywords
Motor redundancy Hierarchical synergy UCM Hypothesis
Motor redundancy is a specific characteristic of human control systems. It is caused by the fact that the elemental variables involved in achieving the goals have a relatively large degrees of freedom compared to the dimensionalities where the performance variables are observed (Latash, 2000). Previous studies that have projected motor redundancy in human motion in terms of variability reported that these redundant degrees of freedom interact with each other to stabilize the key performance variables (Gelfand & Tsetlin, 1966; Latash, Scholz, Danion & Schoner, 2001; Li, Latash & Zatsiorsky, 1998; Park, Jo, Lewis, Huang & Latash, 2013; Scholz, Danion, Latash & Schoner, 2002). Such a strategy of the central nervous system (CNS) organizing family of solutions to achieve a successful performance can be termed as synergy, and it has been proposed to understand the process of neural activities for governing a redundant set of elements (Latash, 2008). In a previous study, an increase of the synergy index, in which each finger force stabilizes the total force and moment as the number of finger degrees of freedom increases (Kim, Xu & Park, 2018), was observed through an analysis method based on the uncontrolled manifold (UCM) hypothesis (Scholz & Schoner, 1999; Scholz, Schoner & Latash, 2000). As a result, the accuracy and precision of task performance were also increased through an experimental method that reproduces the aiming and release behavior of archery was observed.
The most motor tasks experienced in everyday life or in sporting activities require the control of redundant motor systems (synergy) through multiple hierarchies (Latash et al., 2001), and hierarchical control theory of the human motor system has been studied by several researchers (Bernstein, 1967; Gorniak, Zatsiorsky & Latash, 2007; Scholz & Latash, 1998). The experimental implementation of this hierarchical system was conducted in various ways, such as prehension tasks (Baud-Bovy & Soechting, 2001; Gao, Latash & Zatsiorsky, 2005; Shim, Latash & Zatsiorsky, 2005; Zatsiorsky, Gao & Latash, 2003) and two-hand finger pressing tasks (Gorniak et al., 2007; Kang, Shinohara, Zatsiorsky & Latash, 2004). The hierarchical control system concerning the finger force production task using both hands can be divided into two hierarchical control levels. One is the level of bimanual control of both hands, and the other is the multi-finger control of each hand. Previous studies have reported a tendency of these two hierarchical levels to interact with each other to stabilize specific task performance (Gorniak et al., 2007; Kang et al., 2004; Li, Danion, Zatsiorsky & Latash, 2002).
Archery is a sport that uses both hands and multiple fingers, aiming for the accuracy and consistency of the shooting at a specific target (Kim, 2017; Quan & Lee, 2016). It controls the net force on the bowstring and bow orientation by stabilizing the force distributed to both hands and each finger (Kim, 2017). Thus, archery can be a representative example of the hierarchical motor redundancy that can be experienced in sporting situations (Kim, Xu & Park, 2017). This study aimed to confirm the control mechanisms of the hierarchically redundant human motor system through experimental tasks similar to archery shooting. The following four hypotheses were set to find whether the benefits of increasing the kinetic degrees of freedom (DOFs) observed at the multi-finger level could be extended to the hierarchical synergy levels: 1) Synergic characteristics will appear at both the multi-finger (lower hierarchy) level and bimanual (upper hierarchy) level. 2) Increasing the kinetic DOFs of the multi-finger level will increase the synergy indices of the upper and lower hierarchy. 3) Increasing the kinetic DOFs of the lower hierarchy will increase the shooting performance of the task. 4) Both hierarchies of synergy contribute positively to task performance. In order to test these hypotheses, the intra-participant trial-to-trial variability of force and moment (torque), generated at each hierarchy under different finger DOFs conditions, were analyzed. We calculated the accuracy and precision indices also to determine successful performance at the behavior level by the addition of kinetic DOFs and hierarchical organization of the controller (CNS). This approach may provide empirical evidence to support the theory of motor abundance (Latash, 2000; Latash & Zatsiorsky, 2009) by identifying whether the CNS's organizational strategy for addressing motor redundancy can be used beneficially to perform a given task successfully.
1. Participants
In this study, nine right-handed males (age 30.5±3.1 yrs, height 1.72±2.95 m, and weight 73.1±6.6 kg) with no archery related experience participated. We recruited participants who did not have a history that could functionally affect the upper body, including the arms, hands, and fingers, i.e. had not previous injuries affecting the upper body. This study was conducted after obtaining approval from the institutional review board (IRB No. 1703 / 002-006).
2. Apparatus
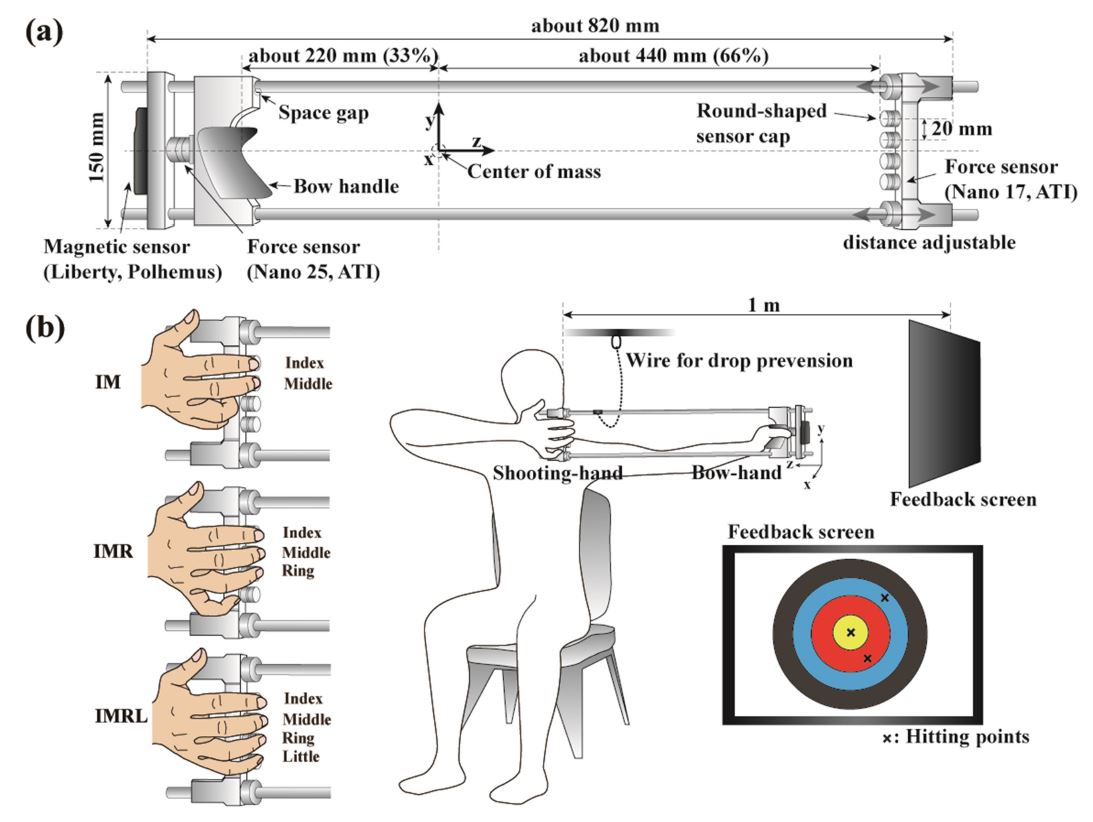
A metal frame of 820 × 150 mm, which was made to reproduce the physical characteristics of the archery bow (Figure 1a) was used. The weight of the frame (including all measuring devices) 1.53 kg, and the z-axis length between the force application points of both hands was about 660 mm, which was adjusted according to the upper extremities and trunk anatomy of the participants. The center of mass of the frame was located about 220 mm (33%) from the contact surface of the bow hand to the shooting (pulling) hand in the z-axis direction, and respect to the x- and y-axis directions was centered.
Four transducers (Nano-17, ATI Industrial Automation Garner, NC) with a diameter of 17 mm were used to measure the force of the pulling fingers (i.e., multi-finger in the lower hierarchy), and one transducer (Nano 25, ATI Industrial Automation Garner, NC) with a diameter of 25 mm was used to measure the force of the bow hand. All transducers of the pulling hand side were aligned and fixed at 20 mm intervals on the vertical direction (y-axis), so that the direction of pressing was perpendicular to the direction of gravity. Finely round-shaped caps (Polylactic acid material) were inserted into the surface of the transducers so that intentional roll or slide of fingertips could be smoothly done when performing the task. A magnetic sensor (Liberty Latus, Polhemus, Colchester, VT) was attached to the front of the frame so that the angle of the frame could be measured and presented as visual feedback to the participants in a real-time. The value measured by the magnetic sensor was compared with the optical motion capture data through a pilot experiment, and the experiment was conducted under no distortion of data. Analog signals from the force transducers and magnetic sensor were digitized via an analog-to-digital converter (NI USB-6225, National Instruments, Austin, TX) and sent to the computer along with the magnetic sensor signal. During the experiment, a customized program was used to collect data and provide visual feedback to the participants using programming software (LabVIEW 2015, National Instruments, Austin, TX), and all data were collected at 100 Hz. The real-time visual feedback was provided to the participants in real-time via a 27-inch monitor screen (Dell, Round Rock, TX) fitted to the participant's eye level at a distance of about 1 m from the participant (Figure 1b). The refresh rate of the feedback screen was 60 Hz.
3. Experimental procedure
The force production and releasing task, which was the main performance of the current experiment. Note that the experimental task was done while sitting on a chair in order to exclude possible mechanical effects of lower extremities during the tasks. The participants were instructed to hold the handle grip on the frame and pressing the transducers arranged in the vertical direction (y-axis) with each finger of the dominant hand. The participants performed a task of pressing the transducers as if pulled with the fingers (aiming) and quickly separating the fingers from the transducers (release) in three conditions of a set of involved fingers including 1) IM (index-middle), 2) IMR (index-middle-ring), and 3) IMRL (index-middle-ring-little) of the right hand (Figure 1b). During the task, each finger of the pulling hand had its proximal interphalangeal joints naturally flexed to about 10~20°. In the IM and IMR conditions, the fingers not participating in the task (ring, little finger) were naturally flexed so that they did not touch the transducers or frame during the task. The participants were placed in a sitting position with their trunk upright on the height-adjustable chair. For the comfortable pulling action, the direction of the virtual target was set to the left of the participant (all right handed). The hip and knee joints were flexed about 90°, and the two feet were kept parallel to the shoulder width. The coordinates set in the transducers were defined as the direction of the virtual target (The x-axis as the mediolateral direction, the y-axis as the vertical direction, and the z-axis as the anteroposterior direction, Figure 1a).
The task was divided into two phases; aiming and release. In the aiming phase, participants produced a pulling force (amount of reference force) and kept it consistently for about first 5 seconds, and the released fingers in a self-paced manner as quickly as possible within the next 5 seconds. For the aiming phase (first 5 seconds), the reference force (FREF) was set to 50% of the maximal voluntary contraction (MVC) force of the involved fingers. We asked each participant to perform 20 trials for each finger combination, thus, a total of 60 trials were per- formed by each participant. The rest time was set to more than 5 minutes between the conditions, and more than 10 seconds between the trials.
4. Data analysis
Customized MATLAB® (ver. 2018a, MathWorks Inc., Natick, MA, USA) codes were used for data analysis. All measured force and angle value were filtered using a zero-lag 4th-order low-pass Butterworth filter (cutoff at 10 Hz).
1) Mechanical model of hand and finger actions
(1) Task constraints
We defined the direction in which the virtual point-mass project was defined as the orientation of the frame measured by the magnetic sensor, and the angle of the frame during the aiming segment was required to be maintained at θ = 0° (facing forward) for x- and y-axes. The information provided as real-time feedback through the front monitor screen included the time information indicating the time of each segment of the task, the force value to be maintained (FREF, 50% MVC force) during the aiming segment, and the angle change of the frame (Figure 1b).
(2) Mechanical constraints
To maintain the static equilibrium of the frame (frame assuming the bow) during the task, the physical constraints of all forces and moment of forces applied to the frame by these two hands must be satisfied. First, the sum of the x-axis and z-axis components of all the forces applied to the frame must be zero, and the sum of the y-axis components should be the same in magnitude as the gravity applied to the frame (Equation 1). Second, the resultant moments applied to the frame should also be zero (Equation 2). Due to the nature of this experiment, moments on the x- and y-axis affect shooting performance, while moments on the z-axis do not affect the initial velocity vector of the virtual point-mass. Therefore, there is no task constraint for the moment on the z-axis, and also, due to the characteristics of the experimental frame, the distortion based on the z-axis between both hands is also fixed by the characteristics of the frame.
, where m = mass of frame, g = gravity, Mi = moment of each axis.
2) Mechanical model of virtual point-mass velocity
The virtual point-mass projected through the force release was assumed to be a mass point without volume and the external force affected the virtual point-mass was only gravity. Note that there was no physical object (e.g., actual arrow) to be released, but the dynamics of the virtual point-mass was computed based on the actual forces produced by the participants. The position coordinates of the virtual point-mass reached the virtual target were determined by the respective axis (x-, y-, z-axis) components of the point-mass initial velocity. We assumed that the energy was stored in the virtual bow by the amount of force (pulling finger force) measured on the transducers through the aiming segment. When the force released without time delay, the energy stored in the virtual bow can be used to move the virtual point-mass to the virtual target without loss of energy. We assumed that the coefficient of elasticity of the virtual bow was 0.7 N/m, and the virtual point-mass weight was 1 kg. These values have been set arbitrarily for convenience of calculation, and the values should be different from the mechanical properties of the actual archery devices. We assumed that the potential energy stored in the virtual bow could be converted to the kinetic energy of the virtual point-mass, and the initial velocity of the point-mass was calculated using the following equation (Equation 3). The momentum loss during the release of the finger force was calculated, assuming that the initial velocity of the virtual point-mass was affected by the integral of the force (momentum) during the release (the second term of Equation 3). The velocity was calculated for the x-, y-, and z-axis components, respectively, and the y-axis component was considered to have a gravitational acceleration of -9.81 m/s2. The force value of tangential components for calculating the velocity of the x- and y-axis components were defined as the z-axis force value multiplied by sin θ (θ = y-, x-axis angle of the frame measured by the magnetic sensor). The distance between the virtual target and the release point was adjusted according to the force capacity of each participant and each finger combination. The z-axis target distance (meter) was defined as the FREF (Newton) multiplied by 0.7 (m/N). According to these assumptions, if there was no error of the force value maintained and the frame orientation in the aiming segment, and the release of the force becomes the form of the step function (the force release time is 0), the virtual point-mass would hit the center of the virtual target (Kim et al., 2018).
, where j = {x, y, z}, v0 = Initial velocity of the virtual point-mass, k = Coefficient of elasticity of the virtual bow, m = Mass of the virtual point-mass, a = the time at which the release of the force was started (t0), b = When the force becomes 0 after release, Faj = The force of the j-axis component at time t0. We defined the onset (t0) at which the release of force started as the point at which 5% of the maximum rate of force change (first-derivative of the z-axis component of the finger force) (Olafsdottir, Yoshida, Zatsiorsky & Latash, 2005). This equation is a computational approach for quantifying the change of the performance (i.e., initial velocity of the virtual point-mass) via a proper organization of multiple finger forces, which could be different from the actual physical phenomenon and motor control process during shooting performances. We tried to define this equation as a model. As the model constant for calculating the initial velocity of the virtual point-mass, we set the values of k and m in the first term and calculated them for each component. Note that these methods are based on two mechanically incompatible equations, work-energy theorem, and impulse-momentum theorem, and contain many assumptions as a simplified model for merely defining the projectile velocity.
3) Performance indices
(1) Absolute error (AE) and Variable error (VE)
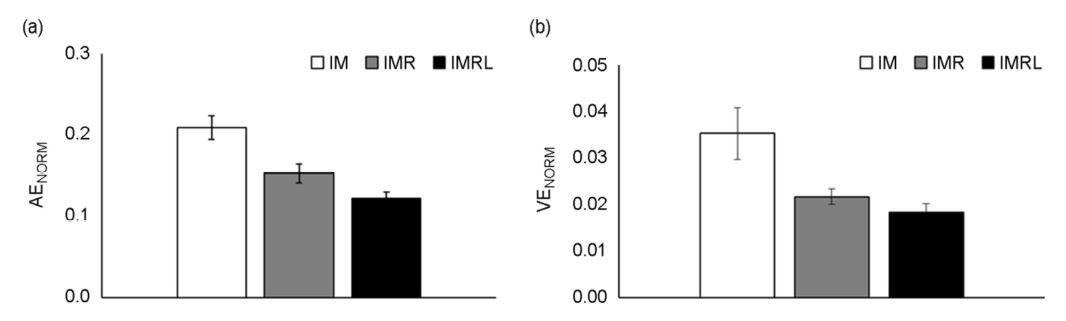
The absolute error (AE) is the average Euclidian distances from the center of the virtual target to the point at which the virtual point-mass reaches (Equation 4), and the variable error (VE): is the average Euclidian distances from the mean hitting point to the point at which the virtual point-mass reaches (Equation 5). AE and VE values are normalized by the target force value for each condition (Kim et al., 2018).
, where n = trial number, xi = The x-axis coordinates of the point at which the virtual point-mass reached in each trial, xcent = The x-axis coordinate (0 mm) of the center of the virtual target, yi = The y-axis coordinates of the point at which the virtual point-mass reached in each trial, ycent = The y-axis coordinate (0 mm) of the center of the virtual target, xmean = The mean x-axis coordinates of the points at which the virtual point-mass reached, ymean = The mean y-axis coordinates of the points at which the virtual point-mass reached, dtarget = target distance for each condition.
(2) Root-mean-square error of force (RMSEF) and angle (RMSEθ)
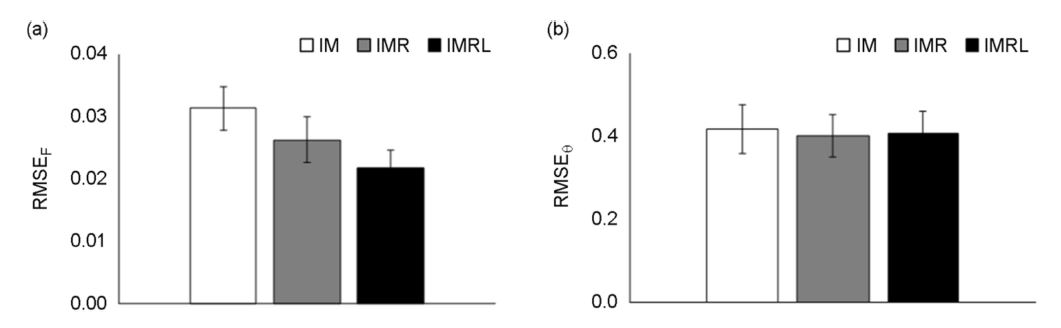
The root-mean-square error (RMSE) of force according to the FREF (RMSEF) and the RMSE of the frame angle (RMSEθ) according to the target angle (θ = 0° according to the z-axis) observed in the steady-state (SS) phase were calculated. The RMSEF was normalized by the FREF value for each condition.
4) Synergy indices (ΔVs)
The synergy indices were divided into the upper hierarchy synergy index (UH_ΔV) and the lower hierarchy synergy index (LH_ΔV). We used analytical methods based on the uncontrolled manifold (UCM) hypothesis (Latash, Scholz & Schoner, 2007) to quantify the synergy indices (ΔVF, ΔVM) for the resultant force (FTOT) and resultant moment (MTOT), where both hands or individual fingers were assumed to stabilize. We assumed the element variables to stabilize the FTOT and MTOT as the force values measured by each transducer and the moment of force values by it.
(1) Upper hierarchy synergy index (UH_ΔV)
The element variables for calculating the force stabilizing synergy indices of upper hierarchy (UH_ΔVF) were the bimanual forces (FB: bow-hand force, FV: virtual finger force). The effects of the individual fingers of pulling hand were vector summed and defined as a FV. The element variables for calculating the moment stabilizing synergy indices of upper hierarchy (UH_ΔVM) were the moments by forces of both hands (MB: the moment by FB, MV: the moment by FV) assuming that the center of rotation is the center of mass (COM) of the frame. The MTOT was calculated by multiplying each force magnitude by the moment arm (i.e. distance between the COM and force application point).
(2) Lower hierarchy synergy index (LH_ΔV)
The element variables for calculating the force stabilizing synergy indices of lower hierarchy (LH_ΔVF) were the individual finger forces of the pulling hand (FI, FM, FR, FL). The element variables for calculating the moment stabilizing synergy indices (LH_ΔVM) were the moments by Individual finger forces (MI, MM, MR, ML). We assumed that the virtual center of rotations for calculating the MTOT by multiple fingers were the midpoint of the application points of Individual finger forces. Each finger force application point was assumed to be fixed on the surface of each transducer, and each moment arm was set to the distance from the virtual center of rotation.
The synergy index of this study was an indicator for determining whether element variables are covaried in a form stabilizing the performance variable. Therefore, it was necessary to divide the variance of each element variable into the variance on the space that stabilizes the performance variables (i.e. null space of Jacobian vector, Latash et al., 2001 for details) and the variance on the space perpendicular to the null space (error space). The Jacobian vector was 1 by n matrix (n=degrees of freedom of elemental variables). The change of the element variable in the null space does not cause the change of the performance variable, and the error space was a space in which the elemental variables cause a change in performance variable, that is, an error. The variance on the null space (VNULL) and the variance on the error space (VERR) of the element variables were calculated for each time point, and the synergy index (ΔV) was quantified by the relative magnitude of VNULL (Equation 6, Latash et al., 2007).
, where i = {UH, LH}, j = {force, moment} ΔV = Synergy index, VNULL = Variance on the null space, VERR = Variance on the error space, VTOT = Total variance (VNULL + VERR), DOFNULL = DOF of the null space, DOFERR = DOF of the error space, DOFTOT = Total DOF (The number of element variables). We normalized the variance of each space (VNULL, VERR) by the DOF of the space (dimensionality), allowing comparison between ΔVs. Further, the ΔVs were log-transformed using the Fischer transformation applied for the computational boundaries (i.e., -2 to +2 for the UH_ΔV and IM condition of the LH_ΔV, from -3 to +1.5 for the IMR, and from -4 to +1.33 for the IMRL condition of the LH_ΔV).
5. Statistical analysis
We used the repeated-measure ANOVAs to statistically evaluate the effects of the factors to the calculated performance Indices (AE, VE, RMSEF, RMSEθ), and synergy indices (ΔVF and ΔVM for each hierarchy). Factors were Level of hierarchy (two levels: UH, LH) and Finger DOF (three levels: IM, IMR, IMRL), and optionally included in the analysis according to the particular statistical tests. The intra-class correlation coefficients (ICC) as a test-retest reliability index for repetitive measurements of force and angle values for each axis were found to be 0.9 or more (p < 0.001) in all conditions. We used Mauchly's sphericity test to confirm the assumptions of sphericity, and the Greenhouse-Geisser correction was applied when the sphericity assumption was rejected. For the post-hoc test, multiple pairwise comparisons with Bonferroni correction were conducted, and Linear regression analysis was used to confirm the correlation between the variables. All statistical significance levels were set at p < 0.05.
1. Performance indices
1) Absolute error (AE) and Variable error (VE)
The AE and VE (Figure 2) decreased with the number of finger DOFs (i.e., the larger the number of fingers for the task, the better target accuracy and consistency). These findings were supported by one-way repeated measure ANOVAs with factor Finger DOF (three levels: IM, IMR, and IMRL) on AE (F[2, 16] = 52.41, p < 0.001, ηp2 = 0.87) and VE (F[2, 16] = 9.12, p = 0.002, ηp2 = 0.53). Post-hoc pairwise comparisons confirmed that the AE of IM > IMR > IMRL, and the VE of IM > IMR, IMRL (p < 0.05).
2) Root-mean-square error of force (RMSEF) and angle (RMSEθ)
The RMSEF (Figure 3) decreased with the number of fingers (DOFs). A one-way repeated measure ANOVA supported these findings with factors Finger DOF (three levels: IM, IMR, and IMRL), which showed significant main effect (F[2,16] = 6.13, p = 0.011, ηp2 = 0.43). The pair-wise comparison confirmed that the RMSEF of IM > IMRL (p < 0.05). However, there were no significant differences between each finger DOF condition on the target angle error (RMSEθ).
2. Synergy indices
1) Force stabilization hypothesis
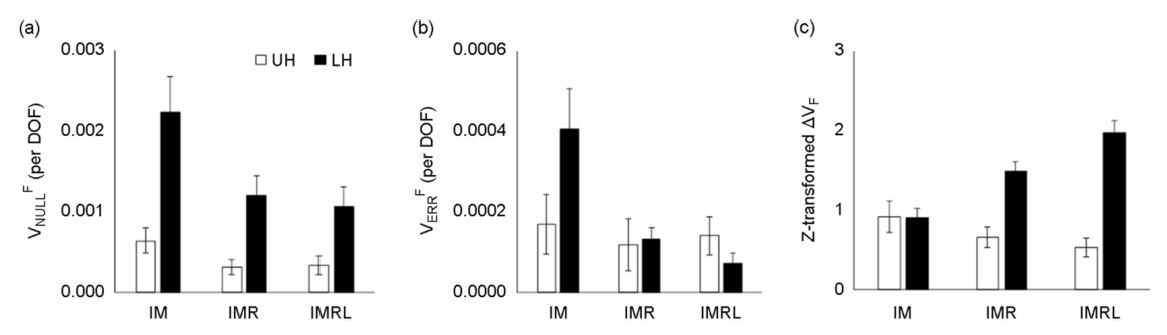
First, we quantified each component of variances per DOF of force stabilization hypothesis (VNULLF and VERRF) between the hierarchies and conditions (Figure 4). We normalized the variances by the square of the relevant reference force (FREF). In general, The VNULLF of the lower hierarchy (multi-finger level) were larger than those of the upper hierarchy (bimanual level) and the VNULLF decreased with the number of finger DOFs. Two-way repeated measure ANOVAs with factors Level of hierarchy (two levels: UH, LH) and Finger DOF (three levels: IM, IMR, and IMRL) was performed and the results showed significant main effects of Level of hierarchy (F[1, 8] = 22.35, p = 0.001, ηp2 = 0.74) and Finger DOF (F[2, 16] = 11.61, p = 0.001, ηp2 = 0.59). Post-hoc pairwise comparison confirmed VNULLF of IM > IMR, IMRL (p < 0.05). The VERRF was decreased with the number of finger DOFs, and the tendency of decreasing VERRF appears to be stronger in the lower hierarchy. Two-way repeated measure ANOVAs with factors Level of hierarchy and Finger DOF were supported the results which showed significant main effects of Finger DOF (F[2, 16] = 9.73, p = 0.002, ηp2 = 0.55) with significant Level of hierarchy × Finger DOF (F[2, 16] = 4.95, p = 0.021, ηp2 = 0.38). The significant Level of hierarchy × Finger DOFs reflected the fact that the tendency according to the factor Finger DOF was appears to be in the lower hierarchy only. Post-hoc pairwise comparison confirmed VNULLF of IM > IMR > IMRL for the lower hierarchy only (p < 0.05).
We quantified the indices of z-transformed force stabilization synergies for the upper and lower hierarchies (UH_ΔVF, LH_ΔVF) during the steady-state force production (Figure 4). In general, the ΔVF of the lower hierarchy (multi-finger level) were larger than those of the upper hierarchy (bimanual level). In the case of ΔVFX and ΔVFZ, the trends of the upper and lower hierarchies were the opposite. These findings were supported by a two-way repeated measure ANOVA on ΔVF setting factors as Level of hierarchy and Finger DOF. The results showed significant main effects of Level of hierarchy (ΔVFZ: F[1, 8] = 20.41, p = 0.002, ηp2 = 0.72), and Finger DOF (F[2,16] = 5.17, p = 0.019, ηp2 = 0.39) with significant Level of hierarchy × Finger DOF (F[2,16] = 28.47, p < 0.001, ηp2 = 0.78). The significant Level of hierarchy × Finger DOFs reflected the fact that the tendency according to the factor Finger DOFs was appears to be opposite between the upper and lower hierarchies. Post-hoc pairwise comparison confirmed the UH_ΔVF of IM > IMR and the LH_ΔVF of IM < IMR < IMRL (p < 0.05).
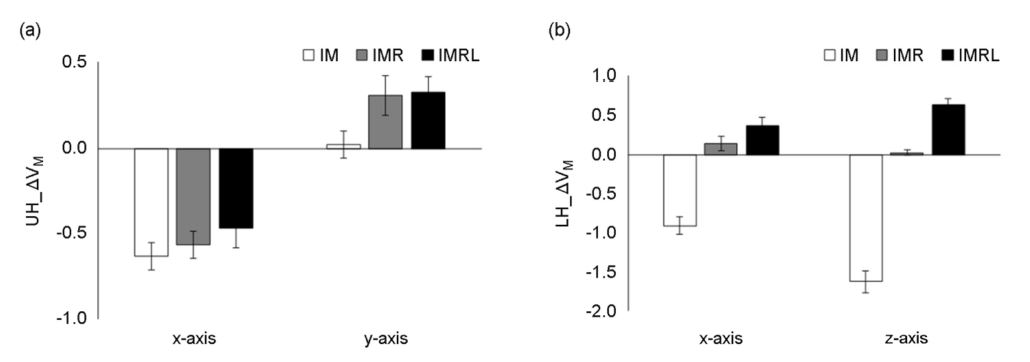
2) Moment stabilization hypothesis
We computed the z-transformed moment stabilization synergies (ΔVM) during the steady-state force production (Figure 5). The element variables for calculating the UH_ΔVM are the moments of forces for both hands, and these values include the effects of changes in the center of pressure (COP) of bow hand force (FB) and virtual finger force (FV). Therefore, the UH_ΔVM of z-axis component was assumed to be zero. Note that there was no statistical correlation between each force magnitude and measured COP value, meaning that both variables were controlled independently. In general, UH_ΔVM of x-axis component showed a negative value, and y-axis component showed a positive value. The UH_ΔVM increased with the number of fingers for both axes components. Two-way repeated measure ANOVA with factors Level of hierarchy and Finger DOF showed significant main effects of Level of hierarchy (F[1, 8] = 50.02, p < 0.001, ηp2 = 0.86) and Finger DOF (F[2, 16] = 4.81, p < 0.023, ηp2 = 0.38) without significant Level of hierarchy × Finger. Post-hoc pairwise comparison confirmed UH_ΔVM of IM < IMRL (p < 0.05).
Note that the center of rotations for the LH_ΔVM was the midpoint of the application points of Individual finger forces (center of each transducer), which means that there were no moment arms for the moment on the y-axis. The LH_ΔVM of IM condition a negative value, and the rest of the conditions showed a positive value. The LH_ΔVM increased with the number of fingers for both axes components. Two-way repeated measure ANOVA with factors Level of hierarchy and Finger DOF showed significant main effects of Level of hierarchy (F[1, 8] = 10.29, p = 0.012, ηp2 = 0.56) and Finger DOF (F[2, 16] = 128.07, p < 0.001, ηp2 = 0.94) with significant Level of hierarchy × Finger. The significant Level of hierarchy × Finger reflected the fact that the tendency according to the factor Finger DOFs on the x-axis was stronger than the z-axis. Post-hoc pairwise comparison confirmed the LH_ΔVM of IM < IMR, IMRL for x-axis and IM < IMR < IMRL for z-axis (p < 0.05).
3. The comparison between synergy indices and performances indices
Figure 6 illustrates the findings for the sets of force and moment stabilizing synergy indices (UH_ΔVF, UH_ΔVMX, UH_ΔVMy, LH_ΔVF, LH_ΔVMX, and LH_ΔVMZ) and the x-component of absolute error (AENORMX) as a performance index across all individual participants and conditions. However, there was no statistical correlation was shown in all ΔVs vs. AENORMX correlations across participants and conditions.

Figure 7 illustrates the findings for the sets of force and moment stabilizing synergy indices (UH_ΔVF, UH_ΔVMX, UH_ΔVMy, LH_ΔVF, LH_ΔVMX, and LH_ΔVMZ) and the y-axis component of absolute error (AENORMY) as a performance index across all individual participants and conditions. In all LH_ΔVs vs. AENORMY and UH_ΔVMy vs. AENORMY showed negative correlations across participants and conditions (i.e., the larger synergy indices, the better target accuracy). The coefficient of correlation (r) were significant (r = -0.61 for LH_ΔVF, -0.57 for LH_ΔVMX, -0.71 for LH_ΔVMZ, and r = -0.62 for UH_ΔVMY).

The current study attempts to verify whether the increase in kinetic degrees of freedom (DOF) causes positive changes in the hierarchical human motor system (bimanual and multi-finger control) through the hypotheses mentioned in the introduction. We thought that "archery-like shooting" actions would be a good example to answer the questions. However, only partial characteristics of archery were reproduced through experiments. Thus, the mechanics of the bow and arrow regarding aerodynamical characteristics were not considered. As a result, an increase in the kinetic DOF of the multi-finger level was accompanied by an improvement in the hierarchical synergy indices and shooting performances. Furthermore, the pattern of synergy indices at both hierarchical levels positively correlated to the task performance. These results could be attributed to the characteristics of the hierarchical free object control task. Therefore, we tried to understand the results based on these factors.
1. Effect of degrees of freedom on hierarchical control
Synergy has been understood as a neural organization of multiple elements that stabilize the primary output variable. In this study, we tried to understand the hierarchical organization of synergy. Several previous studies have covered hierarchical synergy under various characteristics of the task such as pressing (Gorniak et al., 2007; Kang et al., 2004), prehension (Baud-Bovy & Soechting, 2001; Gao et al., 2005; Shim et al., 2005; Zatsiorsky et al., 2003), and pointing (Domkin, Laczko, Jaric, Johansson & Latash, 2002), and most previous studies of bimanual motor task have reported synergic characteristics only at the upper hierarchy (bimanual level) or relatively weak synergy effects at the lower hierarchy (multi-finger level) (Gorniak et al., 2007; Kang et al., 2004). However, the results of the current study showed that the robust synergy patterns were observed at the lower hierarchy (multi-finger level) compare to the upper hierarchy (bimanual level). This result, contrary to the previous findings, could be due to the feature of a given experimental task. We only provided the participants with the total force of the pulling hand (lower hierarchy) as feedback, and it may lead to not ignorable differences in the control strategies of the two-hierarchy. Indeed, Gorniak et al. (2007) only presented the feedback which the total force of both hands (not individual hand forces) in their bimanual finger pressing task, thus observing increased synergy at the upper (bimanual) level than the lower (multi-finger) level. This suggests the possibility that the control strategies of CNS could be different according to a given source of feedback in performing tasks in a hierarchical control scheme.
Another different feature of the current experimental task was that the performed archery shooting task has similar physical characteristics to the prehension task (Shim et al., 2005; Zatsiorsky et al., 2003) in that the forces of the upper hierarchy must be equal and opposite. This feature is a physical constraint caused by experimental conditions that control free objects rather than fixed objects. In the current study, an increase in the DOFs at the multi-finger level has been shown to cause a decrease in the synergy index at the upper hierarchy (Figure 4c). The part that we should pay attention to is the magnitude of the two forces has positive covariation because the two forces at the upper hierarchy must satisfy the equal and opposite constraints due to the nature of the free object control. However, these characteristics tend to conflict with the purpose of the task, and the results show that increasing the DOFs at the multi-finger level decreases the tendency for positive covariation between two force magnitudes at the upper hierarchy (decrease in synergy index with the finger DOFs increase). Since the purpose of this task is to stabilize the force of the pulling hand to a specific force value, it can be seen that the interaction pattern of the elements at the upper hierarchy is changing toward the task-relevant.
Recent studies have shown that increasing the redundant kinetic DOFs in the human body does not simply increase the variability of the solution. Instead, the inclusion of intrinsic constraints that are not cognitively given as tasks can be advantageous in stabilizing the given performance variables with near-optimal solutions. Therefore, optimality and flexibility are not contradictory concepts, but less flexible combinations of elements (i.e., smaller variances) could be associated with better stability (Kim et al., 2018). The results of the current study also showed that the increase in degrees of freedom of the lower hierarchy leads to a decrease in the inter-trial variability of the upper hierarchy as well as the lower hierarchy. Note that the variance of the upper hierarchy tended not to change much compared to the lower hierarchy. In particular, in the case of error variance (VERR), a significant Level of hierarchy × Finger DOF was shown (Figure 4a, b), and it was confirmed that the significant change was robust at the multi-finger level directly related to task performance. In our previous study, employing fixed object control, we confirmed that the decrease in inter-trial variability due to the increase in kinetic DOFs is related to additional internal constraints (Kim et al., 2018). There was a tendency of moment stabilization with increasing finger DOFs even though there was no task constraint for moment stabilization. The moment stabilization synergy Indices of the multi-finger level of the current study also assumes an imaginary point as a rotation center (not directly related to the real task), so it is difficult to see that there is a task constraint for moment stabilization. Nevertheless, the results showed that both the x-axis and z-axis showed a strong tendency to moment stabilization with increasing degrees of freedom. Importantly, increasing the DOFs at the multi-finger level also increased the tendency for moment stabilization at the upper hierarchy (Figure 5a). The task of the current study to control the free object is that the moment stabilization at the upper hierarchy is directly related to the task performance, and the results can also be confirmed through correlation analysis (Figure 6). Thus, it is possible that the increase of finger DOFs at the lower hierarchy (multi-finger level) affects not only the corresponding hierarchy but also the relatively upper hierarchy (bimanual level).
2. Effect of degrees of freedom on the performance indices
Motor abundance means that the CNS positively utilizes the redundant DOFs of the human body in the control process for generating motions to achieve specific task goals. This feature can be identified by checking whether redundant elements participating in particular motor tasks perform purposeful covariations. In our previous study, it was confirmed that an increase in kinetic degrees of freedom (DOFs) causes positive changes in task performance and a significant correlation with the strength of the synergy indices through multi-finger force production and release tasks (Kim et al., 2018). These results showed that the CNS actively utilizes the extra DOFs, and it can improve the stability of performance at the actual behavioral level. However, the mechanical constraints of the motor task performed in our previous study have the limitation that they are different from an actual archery task, and the results of the current study can be expected to be different from the previous study because this study was performed with different mechanical constraints (i.e., free object) and other demands for control (bimanual manipulation). A previous study (Park, Baum, Kim, Kim & Shim, 2012) also reported the difference of the finger action and sharing pattern to depend on the mechanical constraints in the task. However, despite these differences in physical aspects and control requirements, the results of the current study showed an increase in the synergy index with an increasing number of DOF at the hierarchically lower level (multi-finger level). In particular, the index of shooting performance (accuracy and consistency) increased with synergy indices that stabilized the total force and moment. The results show that the interaction of the upper level, as well as the corresponding level, is positively affected by an increase in the kinetic DOFs of the hierarchically lower level. These synergy indices showed a significant correlation with task performance also (Figure 7). The results showed that the synergy of both hierarchies was closely related to the performance of the task. Especially, there was a more robust correlation in the synergy of the lower hierarchy with the vertical directional target accuracy. These results relate to a given source of feedback in performing the task described above, and it reflects the features of a hierarchical human motor system that pursues a task-relevant control. These results provide convincing evidence that despite the differences in task characteristics associated with mechanical constraints, the controller can successfully perform the required task using abundant human DOFs.
This study aimed to verify that the positive contribution to task performance owing to the increased degree of freedom to participate in the task can be extended to additional mechanical constraints (free object control) and hierarchical levels (bimanual and multi-finger levels). The results of this study have confirmed most of the hypotheses mentioned in the introduction. The synergic characteristics appeared at both levels of the hierarchy, and the increasing the kinetic DOFs of the multi-finger level increased the synergy indices of the upper hierarchy also. Furthermore, increasing the kinetic DOFs of the lower hierarchy increased the shooting performance of the task, and both hierarchies of synergy correlated to the task performance. These results suggest that the human control system actively uses the extra degrees of freedom to stabilize the performance variables of the task, and this phenomenon shows simultaneously at the bimanual level (upper hierarchy) and multi-finger level (lower hierarchy). In other words, increasing the degrees of freedom at one level of hierarchy induces positive interactions across hierarchical control levels, which in turn positively affects the performance of the task.
References
1. Baud-Bovy, G. & Soechting, J. F. (2001). Two virtual fingers in the control of the tripod grasp. Journal of Neurophysiology, 86(2), 604-615.
Google Scholar
PubMed
2. Bernstein, N. A. (1967). The co-ordination and regulation of movements. Oxford: Pergamon Press.
Crossref
3. Domkin, D., Laczko, J., Jaric, S., Johansson, H. & Latash, M. L. (2002). Structure of joint variability in bimanual pointing tasks. Experimental Brain Research, 143(1), 11-23. doi: 10.1007/s00221-001-0944-1
Crossref
Google Scholar
PubMed
4. Gao, F., Latash, M. L. & Zatsiorsky, V. M. (2005). Internal forces during object manipulation. Experimental Brain Research, 165(1), 69-83. doi:10.1007/s00221-005-2282-1
Crossref
Google Scholar
PubMed
5. Gelfand, I. M. & Tsetlin, M. l. (1966). On mathematical modeling of the mechanisms of the central nervous system. Gelfan IM, Gurfinkel Vs, Fomin sV, tsetlin Ml (eds) Models of the structural-functional organization organization of certain biological systems. Nauka, Moscow, 9-26.
Crossref
Google Scholar
6. Gorniak, S. L., Zatsiorsky, V. M. & Latash, M. L. (2007). Hierarchies of synergies: an example of two-hand, multi-finger tasks. Experimental Brain Research, 179(2), 167-180. doi:10.1007/ s00221-006-0777-z
Crossref
Google Scholar
PubMed
7. Kang, N., Shinohara, M., Zatsiorsky, V. M. & Latash, M. L. (2004). Learning multi-finger synergies: an uncontrolled manifold analysis. Experimental Brain Research, 157(3), 336-350. doi: 10.1007/s00221-004-1850-0
Crossref
Google Scholar
PubMed
8. Kim, D. K. (2017). The effects of the upright body type exercise program on body balance and record of archers. Korean Journal of Sport Biomechanics, 28(1), 9-18. doi:10.5103/ KJSB.2017.28.1.9
Crossref
Google Scholar
9. Kim, K., Xu, D. & Park, J. (2017). Effect of kinetic degrees of freedom of the fingers on the task performance during force production and release: Archery shooting-like action. Korean Journal of Sport Biomechanics, 27(2), 117-124. doi: 10.5103/KJSB.2017.27.2.117
Crossref
Google Scholar
10. Kim, K., Xu, D. & Park, J. (2018). Effect of kinetic degrees of freedom on multi-finger synergies and task performance during force production and release tasks. Scientific Reports, 8. doi:10.1038/s41598-018-31136-8
Crossref
Google Scholar
PubMed
11. Latash, M. L. (2000). There is no motor redundancy in human movements. There is motor abundance. Motor Control, 4(3), 259-261.
Crossref
Google Scholar
12. Latash, M. L. (2008). Synergy: Oxford University Press.
Crossref
Google Scholar
13. Latash, M. L., Scholz, J. F., Danion, F. & Schoner, G. (2001). Structure of motor variability in marginally redundant multifinger force production tasks. Experimental Brain Research, 141(2), 153-165. doi:10.1007/s002210100861
Crossref
Google Scholar
PubMed
14. Latash, M. L., Scholz, J. P. & Schoner, G. (2007). Toward a new theory of motor synergies. Motor Control, 11(3), 276-308. doi:10.1123/mcj.11.3.276
Crossref
Google Scholar
PubMed
15. Latash, M. L. & Zatsiorsky, V. M. (2009). Multi-finger prehension: control of a redundant mechanical system. Progress in Motor Control: A Multidisciplinary Perspective, 629, 597-618. doi:10.1007/978-0-387-77064-2_32
Crossref
Google Scholar
PubMed
16. Li, S., Danion, F., Zatsiorsky, V. M. & Latash, M. L. (2002). Coupling phenomena during asynchronous submaximal two-hand, multi-finger force production tasks in humans. Neuroscience Letters, 331(2), 75-78. doi:Pii S0304-3940(02)00869-8
Crossref
Google Scholar
17. Li, Z. M., Latash, M. L. & Zatsiorsky, V. M. (1998). Force sharing among fingers as a model of the redundancy problem. Experimental Brain Research, 119(3), 276-286. doi:DOI 10.1007/s002210050343
Crossref
Google Scholar
PubMed
18. Olafsdottir, H., Yoshida, N., Zatsiorsky, V. M. & Latash, M. L. (2005). Anticipatory covariation of finger forces during self-paced and reaction time force production. Neuroscience Letters, 381(1-2), 92-96. doi:10.1016/j.neulet.2005.02.003
Crossref
Google Scholar
PubMed
19. Park, J., Baum, B. S., Kim, Y. S., Kim, Y. H. & Shim, J. K. (2012). prehension synergy: use of mechanical advantage during multifinger torque production on mechanically fixed and free objects. Journal of Applied Biomechanics, 28(3), 284 -290. doi:DOI 10.1123/jab.28.3.284
Crossref
Google Scholar
PubMed
20. Park, J., Jo, H. J., Lewis, M. M., Huang, X. M. & Latash, M. L. (2013). Effects of Parkinson's disease on optimization and structure of variance in multi-finger tasks. Experimental Brain Research, 231(1), 51-63. doi:10.1007/s00221-013-3665-3
Crossref
Google Scholar
PubMed
21. Quan, C. H. & Lee, S. M. (2016). Relationship between Aiming Patterns and Scores in Archery Shooting. Korean Journal of Sport Biomechanics, 26(4), 353-360. doi:http://dx.doi.org/ 10.5103/KJSB.2016.26.4.353
Crossref
Google Scholar
22. Scholz, J. P., Danion, F., Latash, M. L. & Schoner, G. (2002). Understanding finger coordination through analysis of the structure of force variability. Biological Cybernetics, 86(1), 29-39. doi:10.1007/s004220100279
Crossref
Google Scholar
23. Scholz, J. P. & Latash, M. L. (1998). A study of a bimanual synergy associated with holding an object. Human Movement Science, 17(6), 753-779. doi:10.1016/S0167-9457(98)00025-6
Crossref
Google Scholar
24. Scholz, J. P. & Schoner, G. (1999). The uncontrolled manifold concept: identifying control variables for a functional task. Experimental Brain Research, 126(3), 289-306. doi:10.1007/ s002210050738
Crossref
Google Scholar
PubMed
25. Scholz, J. P., Schoner, G. & Latash, M. L. (2000). Identifying the control structure of multi joint coordination during pistol shooting. Experimental Brain Research, 135(3), 382-404. doi: 10.1007/s002210000540
Crossref
Google Scholar
PubMed
26. Shim, J. K., Latash, M. L. & Zatsiorsky, V. M. (2005). Prehension synergies: Trial-to-trial variability and principle of superposition during static prehension in three dimensions. Journal of Neurophysiology, 93(6), 3649-3658. doi:10.1152/ jn.01262.2004
Crossref
Google Scholar
PubMed
27. Zatsiorsky, V. M., Gao, F. & Latash, M. L. (2003). Finger force vectors in multi-finger prehension. Journal of Biomechanics, 36(11), 1745-1749. doi:10.1016/S0021-9290(03)00062-9
Crossref
Google Scholar
PubMed
