Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Narae Shin
Dayuan Xu
Jun Kyung Song
Jaebum Park
http://dx.doi.org/10.5103/KJSB.2019.29.3.157 Epub 2019 October 07
Abstract
Objective: This study examined the effects of stimulating fingertip temperature on the patterns of force sharing and stability properties during multi-finger force production tasks.
Method: 9 adult subjects (male: 3, female: 6, age: 26.11±4.01 yrs, height: 169.22±5.97 cm, weight: 61.44±11.27 kg) participated in this study. The experiment consisted of three blocks: 1) maximal voluntary contraction (MVC) task, 2) single-finger ramp task to quantify enslaving (i.e., unintended force production by non-task fingers), and 3) 12 trials of multi-finger steady-state force production task at 20% MVC. There were three temperature conditions including body-temperature (i.e., control condition), 40℃, and 43℃, and the stimulation was given to the index finger only for all experimental conditions.
Results: There were no significant differences in the MVC forces, enslaving, and the accuracy of performance during the steady-state task between the conditions. However, the share of stimulated index finger force increased with the index fingertip temperature, while the share of middle finger force decreased. Also, the coefficient of variation of both index and middle finger forces over repetitive trials increased with the index fingertip temperature. Under the framework of the uncontrolled manifold (UCM) hypothesis used to quantify indices of multi-finger synergies (i.e., stability property) stabilizing total force during the steady-state task, the two variance components within the UCM analysis increased together with the fingertip temperature, while no changes in the synergy indices between the conditions.
Conclusion: The current results showed that fingertip temperature stimulation only to index finger does not affect to muscle force production capability of multi-finger, independence of individual fingers, and force production accuracy by the involvement of all four fingers. The effect of fingertip temperature on the sharing pattern and force variation may be due to diffuse reflex effects of the induced afferent activity on alpha-motoneuronal pools. However, the unchanged stability properties may be the reflection of the active error compensation strategies by non-stimulated finger actions.
Keywords
Temperature Cutaneous stimulus Maximal voluntary contraction Enslaving Stability Error compensation strategy Synergy
인간의 피부는 외부 자극에 의한 접촉, 변형, 진동, 압력, 통각, 온도 등을 감지하며 각 감각에 반응하는 수용기로 구분되어 있다. 메르켈 원반(Merkel disks)은 접촉과 변형에 반응하고 마이스너 소체(Meissner corpuscle)는 흔들림이나 움직임에 반응하며 루피니 소체(Ruffini corpuscle)는 따뜻한 온도 변화에, 크라우제 끝망울(Krause end bulb)은 차가운 온도 변화에 반응한다. 선행연구에 의하면 온각 수용기는 30~48℃의 온도에서 반응하며 43℃에서 최대 반응을 보이고, 냉각 수용기는 10~ 40℃의 비교적 넓은 범위에서 반응하며 23~28℃에서 최대 반응을 보인다(Iggo, 1969). 특히 10℃ 이하의 온도나 48℃ 이상의 온도에서는 냉각 수용기와 온각 수용기가 활발히 반응하는 범위를 벗어나며, 이때는 통각 수용기가 반응하는 것으로 알려져 있다(Hensel, Iggo & Witt, 1960). 이러한 온도와 관련된 정보를 전달하는 구심성 신경 섬유는 그룹 C 섬유로서 신호의 전달 속도는 비교적 느린 0.4~1.1 m/s로 보고된다(Hensel et al., 1960; McGlone & Reilly, 2010).
손을 이용한 물체의 정교한 조작에는 손끝의 모양, 변형, 진동, 압력 등의 감각 정보가 중요한 요소이며, 힘을 생성하는 능력 또는 전략에 영향을 미친다. 인간은 물체와의 접촉을 통해 얻은 감각 정보를 활용하여 물체를 쥐는 힘을 조정하는 것으로 알려져 있으며, 선행연구에서는 물체의 다양한 형태, 무게 및 마찰 특성에 맞는 그립(grip) 전략을 시각 정보의 의존 없이 감각 정보를 이용하여 수정할 수 있다고 하였다(Jenmalm & Johansson, 1997; Johansson & Westling, 1987). 신경장애 환자들을 통한 연구에서는 피부 접촉 감각의 상실은 힘 발생의 정확성을 감소시킨다고 하였으며(Cole & Sedgwick, 1992) 피부에 부여되는 진동수가 증가할 때 무릎 관절의 최대 자발적 토크(Maximal Voluntary Torque: MVT)가 증가함을 확인하였다(Lee, Song, Ahn & Park, 2017). 한편, 피부 접촉 감각을 임의로 마비시켰을 때 개별 손가락의 힘뿐만 아니라 네 손가락의 최대 자발적 힘(Maximal Voluntary Contraction: MVC) 또한 감소한다고 보고하였다(Shim et al., 2012). 또 다른 연구에서는 손끝 저주파 전기 자극이 일차 체성 감각 피질을 자극, 운동 피질 자극을 활성화시켜 결국 운동출력(Motor Output)을 증가시킨다고 보고함으로써 힘 생성에 있어 피부 접촉 감각의 중요성에 대해 시사하였다(Karol et al., 2016).
인간이 가지는 구성 요소의 과잉성에 의해 움직임의 가변성이 관찰되는데 이 문제를 해결하기 위해 인체 시스템의 중추신경계는 움직임을 조절하는 공동작용(Synergy) 전략을 이용한다. 특정 과제를 만족시키기 위해 중추신경계가 어떻게 각 요소들의 움직임을 수정하는지에 대해서는 아직 명확히 알려진 바는 없으나 공동작용 지수(Synergy Index)를 사용하여 이해하려는 연구들이 최근 활발히 진행되고 있다(Latash, Scholz & Schöner, 2007; Latash, Friedman, Kim, Feldman & Zatsiorsky, 2010; Mattos, Schöner, Zatsiorsky & Latash, 2015; de Freitas, Freitas, Lewis, Huang & Latash, 2018). 비제어 다양체 분석(Uncotrolled manifold hypothesis: UCM)을 기반으로 과잉 요소들의 공동작용을 정량화하는 이 분석법은 관련 연구에서 주요하게 사용되고 있다(Scholz & Schöner, 1999; Latash, Scholz, Danion & Schöner, 2001; Krishnamoorthy, Latash, Scholz & Zatsiorsky, 2003). 기계적 진동 자극을 손바닥에 적용하여 공동작용을 살펴본 Arpinar-Avsar, Park, Zatsiorsky & Latash (2013)의 연구에서는 진동 자극이 손가락의 최대 힘 생성에는 영향을 미치지 않은 반면, 손가락 간 종속성(Enslaving)과 공동작용을 변화시킬 수 있음을 보고하였으며 Singh, SKM, Zatsiorsky & Latash (2010)의 연구에서는 피로에 의한 손가락 수행을 비교하여 각 손가락의 힘 분산 값의 증가를 확인하였다. 이처럼 진동, 피로 등에 따른 손가락 힘에 대한 연구들은 활발히 진행되고 있는 반면 피부의 감각을 느끼는 피부 접촉 자극 수용기의 자극, 특히 열을 감지하는 온도 수용기(Thermoreceptor) 자극에 따른 손가락 힘의 변화가 힘의 안정성(Stability)과 공동 작용에 어떠한 영향을 미치는지에 대해서는 아직 밝혀지지 않았다. 인간의 섬세한 움직임으로 특징지어지는 손의 다자유도 운동에서 온도 자극이 미치는 영향을 확인할 수 있다면, 손뿐만 아니라 많은 자유도를 조절하여 움직임을 효율적이고 안정적으로 조절하는 신체 전반적인 시스템을 이해하는데 도움이 될 것이다.
따라서 본 연구는 피부 접촉 자극 수용기 중 온도 수용기의 인위적 자극이 중추신경계(CNS)를 통해 조절되는 힘의 안정성에 미치는 영향을 규명하고자 손가락 온도 자극이 힘 생성 전략과 손가락 간 공동작용 특성에 미치는 영향을 확인하는데 목적이 있다. 본 연구는 다음의 가설을 바탕으로 진행되었다. (1) 검지 온도 상승에 따라 검지의 최대 자발적 수축력이 증가할 것이다. (2) 검지 온도 상승에 따라 네 손가락 간 종속성 지수가 증가할 것이다. (3) 검지 온도 상승에 따라 네 손가락 합력 생성 과제 시 손가락 힘의 분산이 변화되어 공동작용 지수가 증가할 것이다.
1. 실험참여자
신경학적 병력이 없으며, 손의 조작을 포함한 근골격계의 기능 이상이 없는 건강한 9명의 성인(남성: 3명, 여성: 6명, 나이: 26.11±4.01세, 신장: 169.22±5.97 cm, 체중: 61.44±11.27 kg)이 본 연구에 참가하였다. 모든 연구 참가자들은 오른손잡이로 구성되었다. 본 실험이 시작되기 전, 모든 연구 참가자들은 실험실에 방문하여 연구자로부터 세부적인 실험 절차와 방법에 대한 설명을 들었으며, 소속 대학 연구윤리위원회(IRB)의 승인을 득한 연구 참가 동의서를 작성하였다(IRB No. 1807/003-015).
2. 측정도구
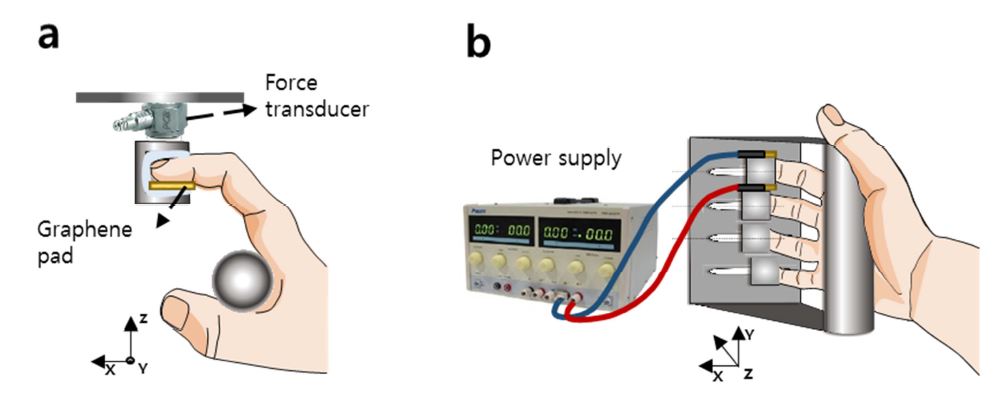
손가락 힘(Finger force) 측정을 위해 4개의 단축 힘 센서(Model 208CO3, PCB Piezotronics, Inc, Depew, NY)가 사용되었다. 힘 측정을 위한 센서는 네 손가락(검지, 중지, 약지, 소지) 굴곡 힘 측정을 위해 개발된 실험용 프레임에 장착되었다. 실험용 프레임은 중력의 영향을 배제하기 위해 전완(Forearm)과 손바닥의 중립 자세가 이루어지도록 설계되었으며, 각 연구 참가자 손의 형태적 특성에 맞게 센서의 거리와 간격을 조절할 수 있도록 고안되었다. 각 센서는 원위 수지(Distal phalanx)에서 굴곡에 의한 수평 방향의 힘을 측정할 수 있도록 프레임에 배치되었다(Figure 1). 손끝 열 발생을 위한 장비로 탄소가 한 층으로 배열된 그래핀(Graphene) 방열 패드가 사용되었다. 그래핀 패드는 0.2 mm의 얇은 두께로 물리적, 화학적 안정성이 매우 높고 열전도율과 전자 이동이 빠른 특성을 지닌다. 본 연구에서 사용된 그래핀 패드는 20 × 20 mm 크기로서 전력 공급기(Power Supply PWS-3003TP, Provice, South Korea)에 의해 연결되었으며 전력 공급기의 전압(Voltage) 조절을 통해 온도가 설정되었다. 본 실험의 과제 수행 동안 연구 참가자의 검지에 온도 자극을 부여하기 위해 4개의 센서 중 검지 센서의 손끝이 닿는 부위에 그래핀 패드를 부착하였다(Figure 1). 이 때 온도 자극은 신경해부학적으로 다른 손가락과의 종속성이 가장 낮은 검지를 선택하여 부여하였다(Zatsiorsky, Li & Latash, 1998). 또한 그래핀 패드의 온도와 연구 참가자의 검지 온도 변화 정도를 측정하기 위해 적외선 열 화상 카메라(FLIR-T660, FLIR, Portland)를 사용하였다. 적외선 열 화상 카메라는 모든 실험 과제 시작 전 그래핀 패드의 온도가 설정된 온도 조건과 일치하는지, 각 시도 전 그래핀 패드에 닫는 연구 참가자의 검지 부분의 온도가 실험 시작 전 검지 온도와 일치하는지 확인하기 위하여 사용되었다. 측정된 모든 아날로그 힘 신호는 아날로그-디지털 변환기(AMTI, Gen5, USA)를 통해 디지털화 되어 컴퓨터로 전송되었으며 LabVIEW (National Instruments, Austin, TX) 소프트웨어를 통해 수집되었다. 실험용 테이블 전면에는 생성된 손가락 힘의 시각적 피드백을 제공하기 위해 모니터를 설치하였으며, 각 과제에 부합하는 템플릿을 제공함으로써 변화하는 손가락 굴곡 힘 정도를 실시간으로 모니터링 할 수 있도록 하였다.
3. 실험절차
모든 연구 참가자는 본 실험이 수행되기 전, 실험실에 방문하여 실험에서 수행될 과제에 대해 숙지하고 연습하는 시간을 가졌다. 이 후 실험자가 판단하였을 때 연습 과제 중 탈락이 발행하지 않고 약 5% 이상 오차가 발생하지 않을 시 본 실험을 진행하였다. 또한 연구 참가자의 수행 자각도를 확인하여 연구 참가자가 충분히 연습이 되었다고 자각할 시 본 실험을 진행하였다. 각 연구 참가자는 어깨의 45° 외전, 팔꿈치의 45° 굴곡 자세에서 전완과 손이 실험용 테이블 위에 놓여지도록 의자 높이를 조정하여 앉았다. 각 연구 참가자의 손은 제작된 실험용 프레임에 고정되었으며, 네 손가락의 원위 수지부가 센서에 닿도록 손가락 길이에 맞추어 센서의 위치가 조정되었다. 실험 과제 수행 시 연구 참가자의 시선은 전방에 설치된 모니터를 향하도록 하였으며, 모니터에는 한 손가락 혹은 네 손가락 힘의 합력이 과제의 목적에 맞게 제공되었다. 그래핀 패드와 검지의 온도 변화를 측정하기 위해 검지의 센서를 향하도록 하여 연구 참가자의 우측에 열 화상 카메라를 설치, 측정하였다.
본 연구의 독립변인이 되는 검지의 온도 조건은 총 세 가지로 설정되었다. (1) 그래핀 패드로 열을 가하지 않은 통제 조건(실험실 온도), (2) 온각 수용기 반응 조건의 40℃, (3) 통각 수용기 반응 조건의 43℃. 이러한 온도 조건은 연구 참가자를 대상으로 수행한 사전 실험을 통해 설정되었다. 온각 수용기가 가장 활발히 반응하는 온도는 43℃, 통각 수용기가 반응하기 시작하는 온도는 48℃로 알려져 있으나 모든 연구 참가자를 대상으로 온도에 따른 지각 정도를 확인한 결과 43℃에서 통증을 느끼기 시작하였다. 따라서 그보다 낮은 40℃로 하향 조정하여 온각 수용기 반응 조건을 설정하였다. 한편, 그래핀 패드에 열을 가하지 않은 통제 온도 조건에서의 패드 온도는 27℃이었다. 또한 본 실험에서 적용될 목표 힘 값을 산출하기 위한 사전검사로서 네 손가락 굴곡의 MVC 힘을 측정하였으며, 두 번의 MVC 시도를 통해 기록된 힘 값의 평균을 기준 MVC 힘 값으로 설정하였다. 세부 측정 방법은 본 실험의 검지 MVC 과제와 동일하게 수행되었다.
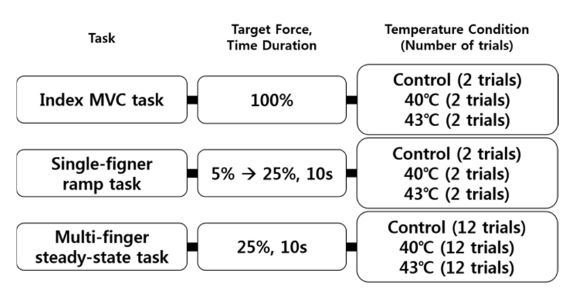
본 실험에서 수행된 힘 생성 과제는 총 세 가지로써 검지 MVC 과제, 점진적 힘 생성 과제, 일정 합력 생성 과제로 구성되었다. 각각의 힘 생성 과제는 세 가지 온도 조건에서 수행되었으며, 온도 조건의 순서는 무작위로 설정 되었다. 모든 힘 생성 과제는 연구 참가자의 손가락이 센서에 접촉하지 않은 상태에서 힘 값의 영점을 설정한 후 시작되었다(Figure 2).
1) 검지 MVC 과제(Index maximum voluntary contrac- tion force production task)
검지 MVC 과제는 접촉 표면 온도에 따른 최대 힘 생성의 차이를 살펴보기 위한 것으로서, 각 연구 참가자는 6초의 과제 수행시간 내 원하는 시점에서 검지를 이용하여 최대 굴곡 힘을 생성하였다. 과제 시도 동안 연구 참가자의 정면에 설치된 모니터를 통해 시각적 피드백을 제공하였으며, 각 온도 조건 당 3분의 휴식시간을 가지고 2회 수행되었다.
2) 점진적 힘 생성 과제(Single-finger ramp force pro- duction task)
점진적 힘 생성 과제는 검지의 온도 변화가 다른 손가락들의 종속성(Enslaving)에 미치는 영향을 살펴보기 위한 것이다. 검지의 온도 자극을 부여한 상태에서 네 손가락 중 한 손가락만을 사용하여 목표 힘을 생성하도록 하였다. 본 과제는 총 10초 간 진행되었으며, 2초 간 MVC의 5% 힘을 유지한 뒤, 6초 동안 MVC의 5% 힘 수준에서 25%까지 선형적으로 힘을 증가시키고 이후 25% MVC의 힘을 2초 간 유지하였다. 연구 참가자는 과제 수행 시 해당 손가락에 관한 힘 정보만을 피드백으로 제공받았지만, 나머지 세 손가락(Non-task finger) 또한 편안하게 센서에 접촉시킨 상태로 의도치 않게 생성되는 힘에 대해 신경쓰지 않도록 지시받았다. 각 손가락 당 세 가지 온도 조건에서 2회의 실험이 수행되었으며, 휴식시간은 과제 시도 간 30초, 온도 조건 간 2분으로 설정하였다.
3) 일정 합력 생성 과제(Multi-finger steady-state force production task)
네 손가락을 이용한 일정 합력 생성 과제는 검지의 온도 변화에 따른 손가락 힘 생성의 공동작용의 변화를 살펴보기 위한 것이다. 목표 힘은 네 손가락 MVC 값의 25%로 설정하였다. 과제 수행시간은 총 10초이며, 시작 2초 이후 네 손가락을 이용해 목표 힘 값을 8초 간 유지하도록 하였다. 각 과제 시도 간 50초의 휴식시간을 갖고 12회 수행되었으며, 온도 조건 간에는 3분 간의 휴식시간이 주어졌다. 이 때 연구 참가자가 피로를 호소할 경우 추가 휴식시간을 부여하였다.
4. 자료처리
수집된 힘 자료는 10 Hz의 zero-lag fourth-order low pass Butterworth filter를 이용하여 필터링 된 후, 각 변인으로 산출되었다. 측정된 모든 자료의 분석은 MATLAB R2016a (Math- Works Inc. Natick, MA, USA)을 이용하였다.
1) 최대 자발적 수축력(Maximum Voluntary Contrac- tion Force: MVC force)
검지 MVC 과제에서 나타난 각 온도 조건 별 2회 힘 값의 평균값을 산출하여 최대 자발적 수축력으로 설정하였다. 각 실험 참여자가 수행한 2회의 MVC 측정값은 실험자에 의해 확인되었으며, 편차가 큰 결과 값이 측정되었을 경우 추가 측정을 통해 일정한 결과를 얻을 수 있도록 하였다.
2) 종속성 지수(Enslaving index)
점진적 힘 생성 과제에서 각 온도 조건에 따라 피험자가 사용한 손가락(Task finger) 외 나머지 세 손가락(Non-task finger)이 생성한 의도하지 않은(Unintended) 힘 값의 정도를 확인하기 위하여 종속성 지수를 산출하였다. 각 시도에서 네 손가락이 6초 동안 점진적으로 생성한 힘 값을 이용하여 선형회귀분석을 진행, 종속성 행렬(Enslaving matrix)을 산출하였다(Equation 1). 이때 (Equation 2)가 회귀계수로 사용되며 j는 과제에 사용한 손가락, i는 과제에 사용하지 않는 손가락을 나타낸다.
Fi,j는 j를 사용한 과제에서 손가락 i가 생성한 힘 값을 나타내며 FTOT,j는 j를 사용한 과제에서의 네 손가락 합력을 나타낸다. 종속성 행렬의 성분들 중 과제에 참여한 손가락의 성분을 제외한 나머지 성분들의 평균값을 이용하여 종속성 지수를 계산하였다(Equation 3).
3) 제곱 평균 제곱근 오차(Normalized Root Mean Square Error: RMSEnorm)
일정 합력 생성 과제에서 온도조건에 따라 힘 생성의 정확성이 어떻게 변하는지 규명하기 위해 표준화된 제곱 평균 제곱근 오차를 산출하였다. 과제를 수행하는 8초 중 초기 2초와 마지막 2초를 제외한 4초 동안 나타난 네 손가락 힘의 총합을 이용하였으며, 각 연구 참가자의 MVC 값으로 제곱 평균 제곱근 오차 값을 표준화(Normalization)하였다(Equation 4). Pi는 i번째 과제 수행 시 목표 힘 값을, Fi는 i번째 과제 수행 시 실제 수집된 힘 값을, FMVC는 각 연구 참가자의 MVC 힘 값을 나타낸다.
4) 힘 분배(Force sharing)
일정 합력 생성 시 온도조건에 따라 각 손가락 힘 값이 어느 정도 분배되는지 확인하기 위하여 힘 분배 지표(Si)를 산출하였다(Equation 5). Fn는 n번째 시도 시 네 손가락 합력의 평균값을 나타내며 Fi,n는 n번째 시도 시 i번째 손가락이 낸 힘의 평균값을 나타낸다.
5) 변동계수(Coefficient of Variation: CV)
일정 합력 생성 시 각 손가락이 생성하는 힘이 각 손가락의 평균 힘에 대해 어느 정도 편차를 보이는지 확인하기 위해 변동계수를 산출하였다. 변동계수는 네 손가락이 생성한 합력이 평균 힘 값으로부터 벗어난 정도(표준편차)를 다시 평균 힘 값으로 나누어 표준화하였다.
6) 공동작용 지수(Synergy index: ΔV)
일정 합력 생성 시 네 손가락이 서로의 힘 생성을 보완하여 합력을 안정화하는 공동작용 정도를 정량적으로 규명하기 위해 비제어 다양체 분석을 기반으로 한 공동작용 지수를 산출하였다(Scholz & Schöner, 1999). 중추신경계가 과제 수행 손가락의 힘을 정의하는 변수를 제어한다고 가정하였으며 이를 mode라 한다. 모든 과제 수행 값을 시작 시점으로부터 시간에 대해 정렬하였고, 이 수행 값이 mode 공간에 분산된 정도를 두 개의 독립적인 하위 공간에서의 분산(VUCM, VORT)으로 정량화하였다. VUCM은 힘의 합력을 안정화 시키는 비제어 다양체 공간 내의 분산이며 중추신경계가 네 손가락을 이용하여 일정 합력을 내는 운동 요소 공동작용를 발생하는지를 평가하는 기준으로 사용될 수 있다. VORT는 손가락 합력에 영향을 미치는 비제어 다양체 공간의 직교 공간에서의 분산이며 수행 결과에 영향을 미치는 오차를 계산하는데 사용할 수 있다. 공동작용 지수(ΔV)는 이 두 분산의 상댓값으로서 VUCM이 커지고 VORT이 작아질수록 큰 값을 가지며, 큰 값의 지수는 작은 값에 비해 중추신경계에 의해 발생하는 공동작용의 정도가 상대적으로 큰 것을 의미한다(세부적인 VUCM, VORT, ΔV의 산출 방법은 Park & Xu (2017)을 참조).
5. 통계분석
모든 통계 처리는 SPSS 21.0 (IBM, USA)을 이용하였다. 각 과제 별 세 온도 조건(통제 온도, 40℃, 43℃)에 따른 손가락 힘 생성의 차이를 검증하기 위해 온도 조건을 요인으로 설정한 반복측정 일원변량 분산분석(one-way repeated measured ANOVA)을 수행하였다. 유의한 주효과에 대한 개별 요인들의 차이는 LSD 사후 검증을 통해 확인하였으며, 모든 통계치의 유의 수준은 α=.05로 설정하였다.
6. 제한점
본 연구에서는 신경학적 병력이 없으며, 손의 조작을 포함한 근골격계의 기능 이상이 없는 건강한 9명의 성인 남녀를 연구 참가자로 모집하였으나 남성이 3명, 여성이 6명으로 불균형한 성비를 이루었다. 성별에 따라 발생하는 절대적인 운동 수행력 차이의 경우 각 피험자의 최대 근력으로 수행력을 평준화하여 절대적인 차이를 배제할 수 있으며, 특히 본 연구의 실험목적과 유사한 손가락 협응 및 공동작용에 관한 선행연구에서 성별 간의 차이는 보고되지 않았음을 확인하였다(Li, Latash & Zatsiorsky, 1998). 또한, 실험 진행 시 각 피험자의 손가락 길이 등에 따라 손가락 힘 센서의 위치를 조절하여 성별에 따른 손 크기에 대한 효과를 최대한 배제하고자 하였다. 하지만 성별에 따른 피하지방 차이 때문에 발생하는 온도 인식 정도의 차이에 의한 효과가 존재할 수 있음을 고려해야 한다. 따라서 여성 연구 참가자가 상대적으로 많은 본 연구 결과는 연구 참가자의 성비 차이를 충분히 인지하고 해석해야 할 것이다.
1. 검지 MVC 과제(Index maximum voluntary contrac- tion force production task)
1) 최대 자발적 수축력(Maximum Voluntary Contrac- tion Force: MVC force)
온도 자극이 주어진 검지의 최대 자발적 수축력은 세 온도 조건에 따라 통계적으로 유의한 차이를 보이지 않았다.
2. 점진적 힘 생성 과제(Single-finger ramp force pro- duction task)
1) 종속성 지수(Enslaving Index)
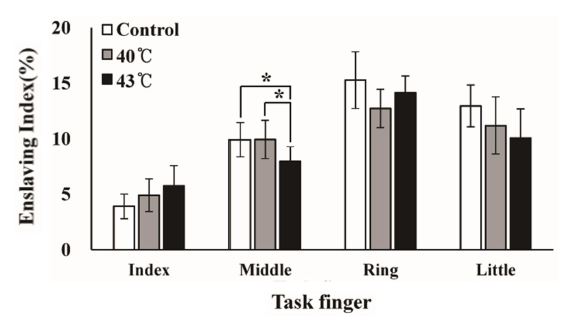
한 손가락이 과제를 수행할 때 나머지 다른 손가락이 의도치 않게(unintended) 힘을 생성하는 종속성은 중지를 사용한 과제 수행에서 온도 조건에 따라 유의한 차이가 나타났으며(F[2,16]=5.34, p=.017), 다른 손가락 및 온도 조건에서는 유의한 차이를 보이지 않았다. 또한 사후 검정을 통해 통제 온도 조건에 비해 43℃의 온도 조건에서 유의하게 낮은 중지의 종속성 지수를 확인하였으며(p=.04), 40℃ 조건에 비해 43℃의 온도 조건에서 유의하게 낮은 중지의 종속성 지수를 확인하였다(p =.013) (Figure 3).
3. 일정 합력 생성 과제(Multi-finger steady-state force production task)
1) 제곱 평균 제곱근 오차(Normalized Root Mean Square Error: RMSEnorm)
검지 온도에 따른 합력의 표준화된 제곱 평균 제곱근 오차의 차이는 온도 조건에 따라 통계적으로 유의한 차이를 보이지 않았다.
2) 힘 분배(Force sharing)
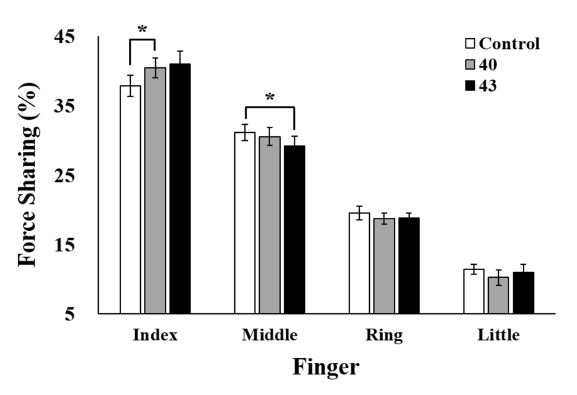
검지의 온도 자극에 따라 일정 합력 생성 시 네 손가락의 힘 분배 차이를 규명하기 위한 반복측정 일원변량 분산분석 결과, 검지(F[2,16]=4.253, p=.033)와 중지(F[2,16]=3.994, p=.039) 손가락에서 온도 조건에 따라 유의한 차이가 나타났다. 사후 검정을 통해 검지의 40℃ 온도 조건에서 통제 온도에 비해 유의한 힘 분배의 증가를 확인하였으며(p=.038), 또한 중지 손가락의 43℃ 온도 조건에서 통제 온도에 비해 유의한 힘 분배 감소를 확인하였다(p=.037) (Figure 4).
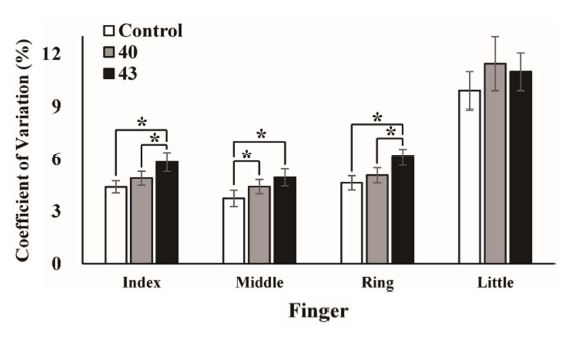
3) 변동계수(Coefficient of Variation, CV)
네 손가락을 이용하여 일정 합력을 유지할 때 손가락이 생성하는 힘 값이 각 손가락의 평균값으로부터 벗어나는 편차(Deviation) 정도를 확인하기 위해 변동계수(CV)를 산출하였다. 그 결과 소지를 제외하고 검지(F[2,16]=10.95, p=.001), 중지(F[2,16] =10.854, p=.001), 약지(F[2,16]=12.04, p=.001) 손가락에서 온도에 따른 변동계수의 유의한 차이가 나타났으며, 모두 온도의 증가에 따라 힘 생성의 편차는 증가하는 경향을 보였다. 검지 힘 생산 시 통제 온도 조건에 비해 43℃ 조건에서 변동계수가 유의하게 높았으며(p=.006), 40℃ 조건에 비해 43℃ 조건에서 변동계수가 유의하게 높은 것을 확인하였다(p=.004). 중지 손가락의 경우 통제 온도 조건에 비해 40℃ 조건에서 변동계수가 유의하게 높았으며(p=.019), 통제 온도 조건에 비해 43℃ 조건에서 변동계수가 유의하게 높은 것을 확인하였다(p=.002). 또한 약지 손가락의 경우 통제 온도 조건에 비해 43℃ 조건에 서 변동계수가 유의하게 높았으며(p=.001), 40℃ 조건에 비해 43℃ 조건에서 변동계수가 유의하게 높은 것을 확인하였다(p=.013) (Figure 5).
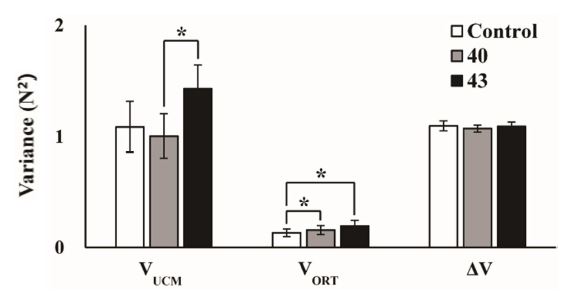
4) 공동작용 지수(Synergy index)
온도 조건에 따른 공동작용 지수의 차이를 반복측정 일원변량 분산분석을 통해 검증한 결과, VUCM (F[2,16]=4.445, p=.029)과 VORT (F[2,16]=4.567, p=.027)의 온도 조건에 따른 유의한 차이를 확인하였다. 사후 검정 결과, VUCM은 40℃ 조건에 비해 43℃ 조건에서 유의하게 높은 것을 확인하였다(p=.024). VORT는 통제 온도에서 40℃ 조건에 비해 유의하게 낮았으며(p=.044), 43℃ 조건에 비해 유의하게 낮은 수준으로 나타났다(p=.029). 한편 온도 조건에 따른 ΔV는 유의한 차이를 보이지 않았다(Figure 6).
본 연구는 손가락 표면 온도 자극에 의한 중추신경계의 전략 수정과 힘 생성의 안정성에 미치는 영향을 규명하고자 하였으며, 그에 따라 검지에 적용된 총 세 가지 온도 조건에서 최대 힘 생성 과제, 점진적 힘 증가 과제, 일정 합력 생성 과제를 수행하였다. 그 결과 검지 최대 자발적 수축력은 온도 자극에 따라 변화하지 않았으며, 점진적 힘 증가 과제에서는 과제 손가락이 중지일 때 손가락 간 종속성(Enslaving Index)에 유의한 차이가 나타났다. 또한 일정 합력 생성 과제 결과 제곱 평균 제곱근 오차(RMSE)는 온도 조건에 따라 차이를 보이지 않았으나 힘 분배(Force Sharing)와 각 손가락 힘 값의 변동계수(CV)는 유의한 차이를 보였다. 한편, VUCM과 VORT는 손끝 온도에 증가에 따라 증가하였으며, 따라서 두 변인의 차이로 나타나는 공동작용 지수(ΔV)는 온도에 따라 유의한 차이를 보이지 않았다.
선행연구에서는 신경차단마취(ring block anesthesia)를 통해 엄지와 검지의 감각을 제거하였을 때 집기 과제(pinch grip task)의 최대 자발적 수축력이 감소하였다고 보고하였다(Augurelle, Smith, Lejeune & Thonnard, 2003). 네 손가락을 마취시켜 피부 감각 피드백을 제거한 또 다른 선행연구에서는 각 손가락의 최대 자발적 수축력뿐만 아니라 총 최대 자발적 수축력 또한 25% 감소하였다고 보고하였다(Shim et al., 2012). 손가락 감각의 중재에 의해 최대 힘 생성 능력이 변화된 이러한 선행연구들을 토대로 본 연구에서도 온각 수용기의 자극이 최대 자발적 수축력에 영향을 미칠 것이라는 가설을 세웠지만, 온도 조건의 변화에 따른 검지의 최대 자발적 수축력의 유의미한 변화는 관찰되지 않았다. 그러나 근 수축에 의해 생성되는 힘은 동원(Recruitment)된 운동단위(Motor unit)의 수와 발화율(Firing rate, Discharge rate)에 의해 결정되며, 같은 결과에서도 운동단위의 동원과 발화율은 달라질 수 있다고 알려져 있다. 따라서 본 연구에서 나타난 온도 조건에 따른 최대 자발적 수축력의 변화는 유의하지 않았지만 힘 값 생성에 영향을 미치는 운동단위의 수 및 발화율의 상대적인 변화 가능성이 존재하며, 추후 동원된 운동단위를 측정하는 연구를 통해 이를 확인할 수 있을 것이다.
네 손가락이 일정한 합력을 생성, 유지하기 위해서는 각 손가락에 의해 발생하는 오차를 보상(Error-compensation)하는 상호작용 전략이 필요하며, 이러한 오차 보상 전략은 공동작용의 근본적인 특징으로 이해되고 있다(Kim, Xu & Park, 2017). 종속성은 한 손가락이 힘을 생성할 때 나타나는 다른 손가락의 의도치 않은 힘으로서 손가락 힘 생성 사이에 정적인(Positive) 관계를 가지는 반면, 오차를 보상하는 공동작용을 위해서는 각 손가락의 작용이 부적관계를 가져야 한다(Latash, 2008). 따라서 종속성과 오차 보상 전략은 수행 손가락들의 상관관계의 측면에서 서로 반대의 의미를 가진다(Martin, Latash & Zatsiorsky, 2009). 본 연구에서 나타난 온도 증가에 따른 중지 손가락 종속성 지수의 감소는 독립성의 증가를 의미하며, 손가락 간 오차를 보상하는데 긍정적인 영향을 미칠 수 있음을 의미한다. 실제, 일정 합력 생성 과제에서 온도의 증가에 따라 중지의 힘이 검지로 분배되었으며, 검지, 중지, 약지의 변동계수는 온도의 증가에 따라 증가하였다. 또한 목표 힘 값에 대한 네 손가락의 합력의 오차(RMSE)는 온도에 따라 차이를 보이지 않았다. 따라서 각 손가락의 힘 생성 편차의 증가에도 불구하고 일정한 합력의 오차를 보인 결과는 각 손가락에서 나타난 힘의 분산이 부적관계로 보완적인 상호작용을 하였음을 의미하며, 온도 증가에 따른 중지 손가락 종속성 감소의 긍정적 결과로 이해된다.
선행연구에서는 종아리 피부에 유해하지 않은(Non-noxious) 온도를 가했을 때보다 유해한(Noxious) 온도를 가했을 때 자세 유지 수행력이 감소하였으며, 이는 압력중심점(Center of pressure) 위치의 증가된 편차가 기인한다고 보고하였다(Blouin, Corbeil & Teasdale, 2003). 본 연구에서 또한 유사하게 온도가 중재된 검지의 변동계수가 온도 증가에 따라 증가하는 결과를 보여주었다. 그러나 온도 자극을 받지 않은 중지와 약지에서도 검지와 같은 변동계수의 증가를 가져왔으며, 이는 손가락 힘 생성 간 적응을 설명하는 제어 체계의 '적응 전략(adaptive strategy)' 때문인 것으로 사료된다. Côté, Feldman, Mathieu & Levin (2008)과 Côté, Mathieu, Levin & Feldman (2002)은 운동학적으로 풍족한 요소를 가지는 다관절 움직임에 대한 연구를 통해 피로 시 중추신경계가 피로의 영향을 받지 않은 요소들의 자유도를 더 많이 사용한다고 하였으며, Singh et al. (2010)는 피로에 의해 한 손가락 힘의 분산이 증가할 때 피로의 영향을 받지 않은 다른 손가락들의 힘 분산 또한 증가하여 합력을 안정화하고 수행의 정확성을 유지한다고 하였다. 즉, 피로의 영향을 받은 요소들의 오차를 보상하기 위해 피로의 영향을 적게 받은 요소들 또한 수행의 변화를 일으켜 요구된 과제 수행을 만족시키는 적응 전략인 것이다. 본 연구의 온도 자극은 선행연구에서 시스템 상태 변화의 원인이 되는 근 피로와는 차이가 있지만, 높은 온도 자극은 통증을 유발하는 통각 수용기를 자극할 수 있고, 주어진 온도 자극에 의해 수행 오차가 증가한 반면 과제 수행의 정확성은 유지되었다는 점에서 '적응 전략' 이론을 뒷받침 할 수 있을 것으로 사료된다.
또한 온도 자극에 따른 VUCM과 VORT의 변화는 공동작용의 관점에서 온도 증가에 따라 오차를 보상하는 각 손가락 간 상호작용 향상에 대한 근거가 될 수 있다. 각 손가락의 힘 증가, 감소가 정적 상관을 가진다면 더 큰 합력의 오차가 발생할 것이다. 그러나 앞서 살펴본 바와 같이 제곱 평균 제곱근 오차의 유의미한 변화 없이 증가된 각 손가락의 변동계수는 각 손가락 간 상호작용이 부적 상관을 가짐을 의미한다. 이와 같이 일정 합력을 유지하기 위한 각 손가락의 힘 변화가 반대 방향으로 증가 혹은 감소를 활발히 반복하는 것은 VUCM의 증가로 나타날 수 있으며, 온도 자극에 의한 종속성의 감소와 함께 손가락 시스템의 안정성과 유연성(Flexibility)이 증가된 것으로 사료된다. 한편, 공동작용 지수(ΔV)는 온도 조건에 따라 차이를 보이지 않았다. 공동작용 지수는 VUCM과 VORT의 상대적인 비율에 의해 결정되는데, 본 연구에서 나타난 VUCM의 증가와 동반된 VORT의 증가는 이러한 결과의 원인이 된다. 온도 자극에 따른 VORT 증가의 뚜렷한 기전을 밝히지 못하는 점은 본 연구의 제한점이 된다. 그러나 연구 결과에서 나타난 각 손가락 간 상호 보완적 상호작용에 대한 여러 근거를 토대로 볼 때, 온도의 영향을 직접적으로 받은 검지에서 기인된 반사(reflex)를 포함한 예측하지 못한 힘의 변화와, 이를 보상하기 위한 다른 손가락 반응의 시간적 지연(delay)이 원인이 되었을 수 있을 것으로 사료된다.
본 연구는 손가락 온도 자극이 힘 생성 전략과 손가락 간 공동작용 특성에 미치는 영향을 확인하기 위해 다음의 세 가지의 실험을 진행하였다. 첫째, 검지 손끝 온도 자극에 따른 최대 자발적 수축력 생성 과제를 수행하였으며, 그 결과 온도 자극에 따른 최대 힘 생성의 차이는 나타나지 않았다. 둘째, 검지에 온도 자극을 부여하고 각 손가락을 이용하여 점진적으로 힘을 증가시키는 과제를 수행하였으며, 그 결과 가장 높은 43℃의 온도에서 중지의 종속성이 감소함을 확인할 수 있었다. 셋째, 검지 온도 자극과 함께 네 손가락을 이용한 일정 합력 생성 과제를 수행하였으며, 목표 힘 값에 대한 합력의 오차는 온도 자극에 따른 차이가 나타나지 않았고, 온도 증가에 따라 중지 손가락에서 검지로의 힘 분배 증가가 나타났으며, 검지, 중지, 약지의 힘 생성 편차는 증가하였다. 한편 VUCM과 VORT는 손끝 온도의 증가에 따라 모두 증가하였으며 공동작용 지수의 변화는 관찰되지 않았다. 따라서 손가락에 적용된 온도 자극은 함께 과제를 수행하는 다른 손가락의 수행을 변화시키며, 온도 자극에 의해 증가된 각 손가락의 힘 생성 변화는 과제의 목적인 합력의 안정성을 유지하는데 긍정적인 영향을 미칠 수 있다. 이는 말초를 통해 수용된 온도 자극이 중추신경계의 힘 생성 전략을 변화시킬 수 있다는 근거를 마련한 것으로서, 추후 쥐거나(grasp) 잡기(prehension) 등의 손의 기능적인 과제와 함께 근육의 활성화 패턴 및 운동단위의 활동을 분석함으로서 확인되어야 할 것이다.
References
1. Arpinar-Avsar, P., Park, J., Zatsiorsky, V. M. & Latash, M. L. (2013). Effects of muscle vibration on multi-finger interaction and coordination. Experimental Brain Research, 229(1), 103-111.
Crossref
Google Scholar
2. Augurelle, A. S., Smith, A. M., Lejeune, T. & Thonnard, J. L. (2003). Importance of cutaneous feedback in maintaining a secure grip during manipulation of hand-held objects. Journal of Neurophysiology, 89(2), 665-671.
Crossref
Google Scholar
3. Blouin, J. S., Corbeil, P. & Teasdale, N. (2003). Postural stability is altered by the stimulation of pain but not warm receptors in humans. BMC Musculoskeletal Disorders, 4(1), 23.
Crossref
Google Scholar
PubMed
4. Cole, J. D. & Sedgwick, E. M. (1992). The perceptions of force and of movement in a man without large myelinated sensory afferents below the neck. The Journal of Physiology, 449(1), 503-515.
Crossref
Google Scholar
5. Côté, J. N., Feldman, A. G., Mathieu, P. A. & Levin, M. F. (2008). Effects of fatigue on intermuscular coordination during repetitive hammering. Motor Control, 12(2), 79-92.
Crossref
Google Scholar
6. Côté, J. N., Mathieu, P. A., Levin, M. F. & Feldman, A. G. (2002). Movement reorganization to compensate for fatigue during sawing. Experimental Brain Research, 146(3), 394-398.
Crossref
Google Scholar
7. de Freitas, P. B., Freitas, S. M., Lewis, M. M., Huang, X. & Latash, M. L. (2018). Stability of steady hand force production explored across spaces and methods of analysis. Experimental Brain Research, 1-18.
Crossref
Google Scholar
8. Hensel, H., Iggo, A. & Witt, I. (1960). A quantitative study of sensitive cutaneous thermoreceptors with C afferent fibres. The Journal of Physiology, 153(1), 113-126.
Crossref
Google Scholar
9. Iggo, A. (1969). Cutaneous thermoreceptors in primates and sub-primates. The Journal of Physiology, 200(2), 403-430.
Crossref
Google Scholar
PubMed
10. Jenmalm, P. & Johansson, R. S. (1997). Visual and somatosensory information about object shape control manipulative fingertip forces. Journal of Neuroscience, 17(11), 4486-4499.
Crossref
Google Scholar
11. Johansson, R. S. & Westling, G. (1987). Signals in tactile afferents from the fingers eliciting adaptive motor responses during precision grip. Experimental Brain Research, 66(1), 141-154.
Crossref
Google Scholar
12. Karol, S., Koh, K., Kwon, H. J., Park, Y. S., Kwon, Y. H. & Shim, J. K. (2016). ORIGINAL: The Effect of Frequency of Transcutaneous Electrical Nerve Stimulation (TENS) on Maximum Multi-finger Force Production. Korean Journal of Sport Biomechanics, 26(1), 93-99.
Crossref
Google Scholar
13. Kim, K., Xu, D. & Park, J. (2017). Effect of Kinetic Degrees of Freedom of the Fingers on the Task Performance during Force Production and Release: Archery Shooting-like Action. Korean Journal of Sport Biomechanics, 27(2), 117-124.
Crossref
Google Scholar
14. Krishnamoorthy, V., Latash, M. L., Scholz, J. P. & Zatsiorsky, V. M. (2003). Muscle synergies during shifts of the center of pressure by standing persons. Experimental Brain Research, 152(3), 281-292.
Crossref
Google Scholar
15. Latash, M. L. (2008). Synergy. Oxford University Press.
Crossref
Google Scholar
16. Latash, M. L., Friedman, J., Kim, S. W., Feldman, A. G. & Zatsiorsky, V. M. (2010). Prehension synergies and control with referent hand configurations. Experimental Brain Research, 202(1), 213-229.
Crossref
Google Scholar
17. Latash, M. L., Scholz, J. F., Danion, F. & Schöner, G. (2001). Structure of motor variability in marginally redundant multifinger force production tasks. Experimental Brain Research, 141(2), 153-165.
Crossref
Google Scholar
18. Latash, M. L., Scholz, J. P. & Schöner, G. (2007). Toward a new theory of motor synergies. Motor Control, 11(3), 276-308.
Crossref
Google Scholar
PubMed
19. Lee, J., Song, J., Ahn, J. & Park, J. (2017). The Effect of Short-term Muscle Vibration on Knee Joint Torque and Muscle Firing Patterns during a Maximal Voluntary Isometric Contraction. Korean Journal of Sport Biomechanics, 27(2), 83-90.
Crossref
Google Scholar
20. Li, Z. M., Latash, M. L. & Zatsiorsky, V. M. (1998). Force sharing among fingers as a model of the redundancy problem. Experimental Brain Research, 119(3), 276-286.
Crossref
Google Scholar
21. Martin, J. R., Latash, M. L. & Zatsiorsky, V. M. (2009). Interaction of finger enslaving and error compensation in multiple finger force production. Experimental Brain Research, 192(2), 293-298.
Crossref
Google Scholar
22. Mattos, D., Schöner, G., Zatsiorsky, V. M. & Latash, M. L. (2015). Motor equivalence during multi-finger accurate force production. Experimental Brain Research, 233(2), 487-502.
Crossref
Google Scholar
23. McGlone, F. & Reilly, D. (2010). The cutaneous sensory system. Neuroscience & Biobehavioral Reviews, 34(2), 148-159.
Crossref
Google Scholar
24. Park, J. & Xu, D. (2017). Multi-finger interaction and synergies in finger flexion and extension force production. Frontiers in Human Neuroscience, 11, 318.
Crossref
Google Scholar
25. Scholz, J. P. & Schöner, G. (1999). The uncontrolled manifold concept: identifying control variables for a functional task. Experimental Brain Research, 126(3), 289-306.
Crossref
Google Scholar
26. Shim, J. K., Karol, S., Kim, Y. S., Seo, N. J., Kim, Y. H., Kim, Y. & Yoon, B. C. (2012). Tactile feedback plays a critical role in maximum finger force production. Journal of Biomechanics, 45(3), 415-420.
Crossref
Google Scholar
27. Singh, T., SKM, V., Zatsiorsky, V. M. & Latash, M. L. (2010). Fatigue and motor redundancy: adaptive increase in finger force variance in multi-finger tasks. Journal of Nneurophysiology, 103(6), 2990-3000.
Crossref
Google Scholar
28. Zatsiorsky, V. M., Li, Z. M. & Latash, M. L. (1998). Coordinated force production in multi-finger tasks: finger interaction and neural network modeling. Biological Cybernetics, 79(2), 139 -150.
Crossref
Google Scholar
