Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Yeon-Jong Lee
Joo-Nyeon Kim
http://dx.doi.org/10.5103/KJSB.2019.29.2.97 Epub 2019 July 06
Abstract
Objective: The aim of this study was to investigate the strategies for avoiding moving and stationary walker using body segments during walking.
Method: Ten healthy young adults (10 males, age: 24.40±0.49 yrs, height: 175.80±5.22 cm, body mass: 70.30±5.22 kg) participated in this study. Each participant was asked to perform a task to avoid collisions with another walker who was moving or stationary during walking on the 10 m walkway. Both walkers were performed at natural self-selected walking speed.
Results: Medio-lateral avoidance displacement of the trunk and the pelvis were significantly increased when avoiding a stationary walker (p<.05). There were no significant differences in medio-lateral center of mass trajectory. Rotation angle of trunk, pelvis and foot on the vertical axis were significantly increased when avoiding a stationary walker (p<.05).
Conclusion: Based on our results, when another walker moves continuously, the walker recognizes another walker as the object of social interaction and performs the avoidance strategies while expecting the cooperative distance. On the other hand, when another walker is stopped, it is determined that the walker has an obligation to avoid, and the walker performs a relatively safer avoidance strategy.
Keywords
Collision avoidance Human locomotor Human obstacle
보행은 인간이 일상생활을 영위하는데 반드시 수반되는 대표적인 움직임 중에 하나이며, 환경적 자극에 대처하며 걷는 것은 현대도시환경에서 보편화되었다. 인간은 일상생활에서 보행을 수행하면서 수많은 형태와 수많은 크기의 장애물을 마주하게 되고, 이를 넘거나 피하는 전략을 통해 원하는 경로로 이동한다(Alcock, Galna, Hausdorff, Lord, & Rochester, 2018; Yoon, Chang, & Kim, 2014; Choi & Yoon, 2010). 보행 중 사물이나 사람같은 장애물과의 충돌을 피하는 능력은 보행능력 이외에 독립적인 이동성(independent mobility)을 요구하기 때문에(Gérin-Lajoie, Richards, & McFadyen, 2005; Olivier, Marin, Crétual, Berthoz, & Pettré, 2013; Patla & Shumway-Cook, 1999), 충돌을 피하거나 낙상을 예방하기 위한 장애물 보행 연구가 다양하게 이뤄지고 있다.
인간은 보행 중 장애물에 직면했을 때, 짧은 시간 안에 장애물의 높이, 너비, 위치 등을 파악하여, 보행을 멈출지, 장애물을 넘어갈지, 장애물을 우회하여 돌아갈지 판단한 후, 보행속도 및 보행경로, 각 분절의 높이 및 방향에 변화를 시도한다(Gibson, 1979; Kim & Yu, 2009; Patla, Prentice, Robinson, & Neufeld, 1991). 이때 장애물의 높이가 높을 경우, 장애물과의 충돌을 피하기 위해 우회전략 또는 회피전략을 수행하게 되고, 이때 장애물에 접근하는 구간과 장애물을 극복하는 순간에서 각각의 독특한 전략을 나타낸다. Gérin-Lajoie 등(2005)은 보행 시 인간모양의 장애물과의 충돌을 피하기 위해 초기에 나타나는 신체중심의 편차와 일정한 우회거리를 통해 장애물과 보행자 간에 발생할 수 있는 몇 가지 예측과 사전계획이 존재하는 것을 증명했다. 보행자는 장애물을 인지한 시점에서 더 많은 정보처리가 요구되기 때문에 스텝길이를 줄이면서 보행속도를 늦추고, 장애물에 대한 정보처리 완료 후 장애물을 우회할 때는 크기가 조정된 타원형의 개인공간을 보존하는 것으로 나타났다(Gérin-Lajoie et al., 2005; Gérin-Lajoie, Richards, & McFadyen, 2006; Patla, Adkin, Martin, Holden, & Prentice, 1996). 따라서 장애물과 충돌을 방지하기 위한 움직임을 수행함에 있어, 개인공간(personal space)의 보전은 환경적인 상황에 따라 보행 적응(gait adaptation)을 계획하기 위한 이동 시스템의 통제 기준으로 사용된다는 것을 알 수 있다.
현실에서는 유동인구가 많은 지역에서 움직이고 있는 자동차나 다른 보행자와 같은 동적 장애물(moving obstacle)을 반드시 직면하게 되고, 충돌을 방지하기 위한 보행전략을 수행해야만 한다. 동적 장애물의 경우 보행자와 동적 장애물이 둘 다 움직이고 있기 때문에, 기둥이나 서있는 사람과 같은 정적 장애물(stationary obstacle)에 비해 추가적인 과제(additional challenge)가 요구된다(Fajen, 2013). 인간은 정적 장애물이나 동적 장애물과의 충돌을 방지하기 위해 각각의 독특한 전략을 사용한다. 정적 장애물의 충돌방지는 시차이동(parallactic displacement)의 고정과 변화에 의존하는 반면, 동적 장애물은 장애물과의 거리에 대하여 시각적인 추적(visual tracking)과 그들의 시선이동각(gaze movement angle)의 고정과 변화에 의존하고(Basili et al., 2013; Cutting, Vishton, & Braren, 1995), 이에 따라 보행전략이 수정된다.
인간은 또한 장애물의 형태에 따라 충돌을 방지하기 위한 보행전략의 변화를 나타낸다. 예를 들어, 장애물과 장애물 사이를 통과(aperture crossing)해야 하는 상황에서, 서있는 사람 사이를 통과할 때에 비해 정지된 폴(pole) 사이를 통과할 때 더 빠르게 통과한다(Hackney, Cinelli, & Frank, 2015). 또한 가상현실(virtual reality)에서의 실험결과에 따르면, 실린더(cylinders)나 사람의 다리 또는 사람의 전신(full body)에 따라 다른 통과거리(crossing distances)가 관찰되었고(Lynch et al., 2017), 이러한 차이는 보행전략에서도 나타난다. 하지만 지금까지의 장애물 충돌방지에 관한 연구들은 대부분 정적 장애물로 제한됐거나, 실린더 혹은 마네킹을 동적 장애물로 이용하였다(Aravind & Lamontagne, 2014; Cinelli, Patla, & Allard, 2008; Gérin-Lajoie et al., 2005, 2006; Gérin-Lajoie, Richards, Fung, & McFadyen, 2008). 또한 보행 시 장애물 충돌방지 전략을 조사한 대부분의 연구들은 시공간 보행변수(spatio-temporal gait parameters)만을 제시하였기 때문에 신체분절을 이용한 충돌방지 전략을 제시하는데 어려움이 있다(Simieli et al., 2017).
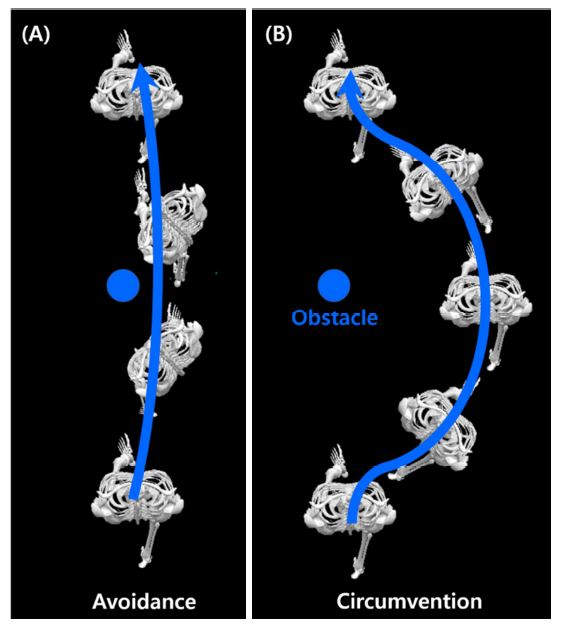
보행 중 장애물 충돌방지 전략은 보행자가 만들고자 하는 안전마진(safety margin)에 따라 두 가지 형태로 나눠진다. 먼저, 장애물의 안전마진이 짧을 경우 보행경로의 변화에 큰 변화없이 인체분절을 이용한 회피(avoidance, Figure 1A)를 시도하고, 안전마진이 길 경우 보행경로를 변화시켜 우회(circumvention, Figure 1B)를 시도한다(Basili et al., 2013). 현실에서는 상대 보행자가 장애물로서 나타나는 상황이 빈번하게 발생하고 충돌방지의 과제에 놓이게 된다. 멈춰있거나 움직이는 상대 보행자를 장애물로서 인지하고, 충돌을 방지하기 위한 전략(회피 또는 우회)을 선택하여 보행전략 및 회피전략을 동시에 수행해야 하는 다중과제의 문제에 직면하게 된다. 따라서 장애물의 정적인 상태와 동적인 상태를 분류하여 연구가 진행되어야 할 필요성이 있을 뿐만 아니라, 각 분절을 이용한 충돌방지 전략에 대한 운동학적인 분석이 이뤄져야 한다. 본 연구의 목적은 보행 시 상대 보행자의 정적 · 동적 상태에 따른 충돌방지 전략의 변화를 조사하기 위해 인체분절의 운동학적 분석을 실시하는 것이다.
1. 연구대상자
본 연구의 대상자는 최근 6개월간 정형외과적 병력이 없는 건강한 성인 남성 10명으로 선정하였다(Table 1). 실험 전, 소속 대학교 생명윤리위원회의 승인을 받고, 모든 피험자에게 연구목적 및 실험절차에 관한 설명을 충분히 한 후, 실험참여 동의서에 동의한 피험자에 한하여 실험을 진행하였다(IRB No: SMU-2018-05-004-01).
|
|
Healthy adults (n=10) |
|
Age (yrs) |
24.40±0.49 |
|
Body mass (kg) |
70.30±5.22 |
|
Height (cm) |
175.80±4.98 |
2. 실험절차
본 연구는 보행자(피험자)가 움직이는 상대 보행자(동적 장애물)와 멈춰있는 상대 보행자(정적 장애물)와의 충돌을 방지하기 위한 전략의 변화에 대한 운동학적 분석을 실시하기 위해 10 m의 보행로에서 보행을 실시하였다. 운동학적 분석을 실시하기 위해 6대의 적외선 카메라(Vicon, UK)를 두 보행자가 만나 충돌방지 전략이 이뤄지는 구간에 설치하였고, 이때 촬영속도(sampling rates)는 200 Hz로 설정하여 Nexus 1.8.5 (Vicon, UK) 프로그램을 이용해 통제하였다. 보행자의 몸통, 골반 및 왼쪽(충돌측) 발 분절을 모델링하기 위해 자체제작한 반사마커 38개를 각 분절 및 관절점에 부착하였다. 상대 보행자는 보행자와 일정 거리에서 멈춰서서 정적 장애물 역할을 수행하거나, 멈추는 동작 없이 목표지점으로 걸어가서 동적 장애물 역할을 수행하였다. 이때 상대 보행자는 어떠한 회피동작도 하지 않았고, 보행자가 사전에 상대 보행자의 역할을 파악하는 것을 방지하기 위해 두 가지 조건을 임의로 선정하여 수행하였다. 또한 보행자가 충돌방지 전략을 수행함에 있어, 경로선택 및 충돌방지 전략(우회 또는 회피)을 선택할 수 있도록, 상대 보행자의 이동축(locomotion axis)을 보행자의 왼쪽 15 cm로 설정하였다(Hackney, Van Ruymbeke, Bryden, & Cinelli, 2014). 모든 피험자는 각 충돌조건에 따라 각각 3회의 보행을 선호속도로 실시하였다.
3. 자료처리
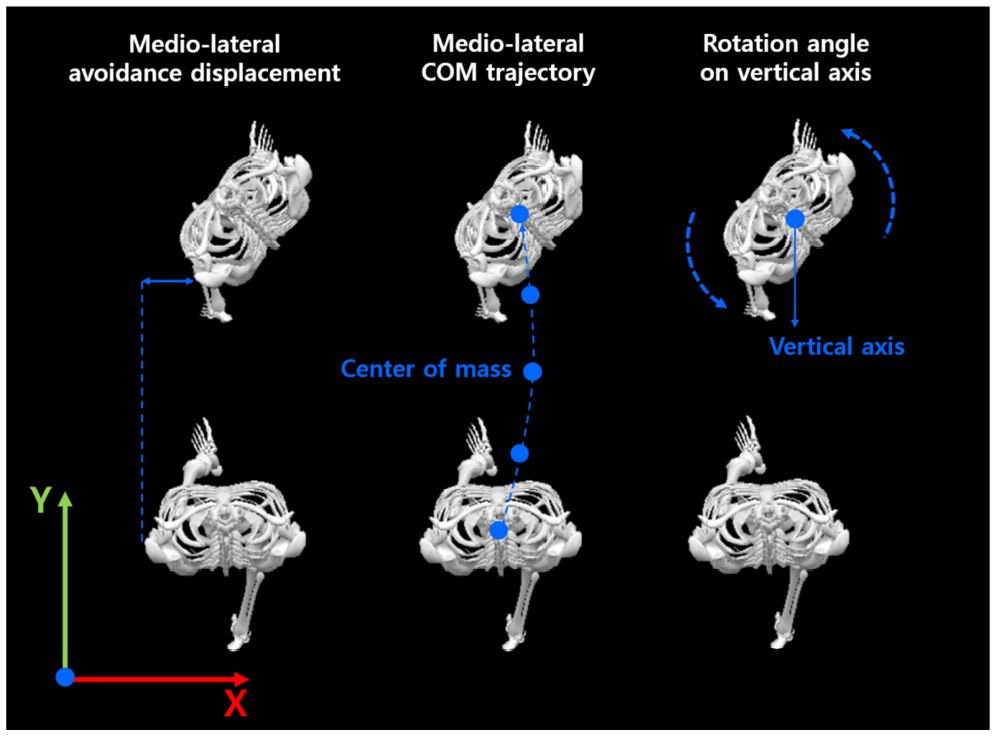
각 피험자가 동작 수행 시 부착한 마커의 3차원 데이터는 Visual3D (C-motion, USA)를 이용해 처리하였다. 수집된 마커의 위치데이터는 non-linear transformation (NLT) 방식을 사용하여 각 카메라에서 측정된 마커의 위치좌표를 3차원 좌표값으로 변환한 후, Butterworth 2nd order low-pass filter를 사용해 노이즈를 제거하였고, 이때 차단주파수는 6 Hz로 설정하였다. 각 분절의 3차원 각도는 standing trial에서 획득한 각 분절의 3차원 위치자료를 기반으로 분절중심점에 단위벡터를 위치시켜 Joint Coordinate System을 설정하고, Cardan Xyz rotation sequence (x: medial-lateral, y: antero-posterior, z: vertical)를 사용하여 계산하였다(Cole, Nigg, Ronsky, & Yeadon, 1993). 분석구간은 회피구간(장애물을 회피하는 동안의 보행주기)으로 설정하였다(Barbieri et al., 2018). 분석변인은 각 분절들의 충돌방지 전략을 조사하기 위해 몸통, 골반, 발 분절 질량중심의 좌 · 우 이동경로(medio-lateral trajectory)와 몸통, 골반, 발 분절의 좌 · 우 회피 변위(medio-lateral avoidance displacement), 몸통, 골반, 발 분절이 수직축(vertical axis)에서 전역좌표(global axis)를 기준으로 이루는 회전각도(rotation angle)의 최대값을 산출하였다(Figure 2).
4. 통계분석
상대 보행자가 보행 중 장애물로 나타났을 때 동적인 또는 정적인 상태에 따른 충돌방지 전략의 차이를 분석하기 위해 대응표본 t-test (paired t-test)를 실시하여 통계적인 차이를 분석하였고, 유의수준은 α=.05로 설정하였다.
1. 좌 · 우 회피 변위(Medio-lateral avoidance displacements)
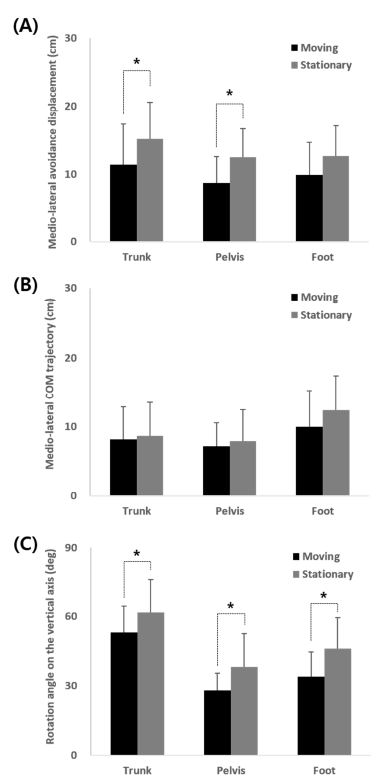
몸통의 좌 · 우 회피 변위는 움직이는 보행자 회피 시 11.39±5.95 cm, 멈춰있는 보행자 회피 시 15.18±5.39 cm로 멈춰있는 보행자 회피 시, 움직이는 보행자 회피 시에 비해 유의하게 증가한 것으로 나타났다(p<.05, Table 2, Figure 3A). 골반의 좌 ·우 회피 변위는 움직이는 보행자 회피 시 8.72±3.84 cm, 멈춰있는 보행자 회피 시 12.45±4.18 cm로 멈춰있는 보행자 회피 시, 움직이는 보행자 회피 시에 비해 유의하게 증가한 것으로 나타났다(p<.05, Table 2, Figure 3A). 발의 좌 · 우 회피 변위는 움직이는 보행자 회피 시 9.86±4.79 cm, 멈춰있는 보행자 회피 시 12.67±4.41 cm로 두 조건 간에 유의한 차이는 나타나지 않았다(Table 2, Figure 3A).
|
Variables |
Segments |
Human obstacle |
t-value |
p-value |
|
|
Moving |
Stationary |
||||
|
Medio-lateral (cm) |
Trunk |
11.39±5.95 |
15.18±5.39 |
-2.954 |
.016* |
|
Pelvis |
8.72±3.84 |
12.45±4.18 |
-2.802 |
.021* |
|
|
Foot |
9.86±4.79 |
12.67±4.41 |
-1.508 |
.166 |
|
|
Medio-lateral (cm) |
Trunk |
8.24±4.68 |
8.67±4.86 |
-.285 |
.782 |
|
Pelvis |
7.18±3.43 |
7.92±4.56 |
-.458 |
.658 |
|
|
Foot |
10.01±5.24 |
12.39±5.02 |
-1.231 |
.249 |
|
|
Rotation angle (deg) |
Trunk |
52.94±11.48 |
61.72±14.58 |
-3.542 |
.006* |
|
Pelvis |
28.10±7.25 |
38.14±14.44 |
-3.641 |
.005* |
|
|
Foot |
33.90±10.75 |
46.04±13.52 |
-3.618 |
.006* |
|
2. 좌 · 우 질량중심 궤도(Medio-lateral COM trajectories)
몸통의 좌 · 우 질량중심 궤도는 움직이는 보행자 회피 시 8.24±4.68 cm, 멈춰있는 보행자 회피 시 8.67±4.86 cm로 두 조건 간에 유의한 차이는 나타나지 않았다(Table 2, Figure 3B). 골반의 좌 · 우 질량중심 궤도는 움직이는 보행자 회피 시 7.18±3.43 cm, 멈춰있는 보행자 회피 시 7.92±4.56 cm로 두 조건 간에 유의한 차이는 나타나지 않았다(Table 2, Figure 3B). 발의 좌 · 우 질량중심 궤도는 움직이는 보행자 회피 시 10.01±5.24 cm, 멈춰있는 보행자 회피 시 12.39±5.02 cm로 두 조건 간에 유의한 차이는 나타나지 않았다(Table 2, Figure 3B).
3. 수직축 회전 각도(Rotation angle on the vertical axis)
몸통의 수직축 회전은 움직이는 보행자 회피 시 52.94±11.48°, 멈춰있는 보행자 회피 시 61.72±14.58°로 멈춰있는 보행자 회피 시, 움직이는 보행자 회피 시에 비해 유의하게 증가한 것으로 나타났다(p<.05, Table 2, Figure 3C). 골반의 수직축 회전은 움직이는 보행자 회피 시 28.10±7.25°, 멈춰있는 보행자 회피 시 38.14±14.44°로 멈춰있는 보행자 회피 시, 움직이는 보행자 회피 시에 비해 유의하게 증가한 것으로 나타났다(p<.05, Table 2, Figure 3C). 발의 수직축 회전은 움직이는 보행자 회피 시 33.90±10.75°, 멈춰있는 보행자 회피 시 46.04±13.52°로 멈춰있는 보행자 회피 시, 움직이는 보행자 회피 시에 비해 유의하게 증가한 것으로 나타났다(p<.05, Table 2, Figure 3C).
일상생활에서 인간은 이동 시 수많은 장애물을 마주하게 되고, 이러한 장애물과의 충돌을 피하기 위해 장애물을 인지하기 위한 정보처리 능력과 이를 기반으로 한 충돌방지 전략 수행이 요구된다. 보행자는 장애물의 형태 및 거리를 사전에 파악하고 충돌방지 전략을 수립하기 위한 시각적 처리가 필요하기 때문에, 먼저 장애물에 접근하는 보행속도를 줄인다(Gérin-Lajoie et al., 2005). 충돌을 감지할 수 있는 충분한 시간을 확보하기 위해 느린속도로 걷는 동안 개인공간(personal space) 또는 안전마진(safety margin)을 구축하고, 이를 유지하기 위해 장애물을 우회(circumvention)할지 단순한 회피(avoidance)동작에 의존할지 결정한다(Gérin-Lajoie et al., 2008). 이러한 장애물과의 안전마진은 장애물의 유형뿐만 아니라 장애물이 멈춰있거나 움직이는 이동상태에 따라 충돌방지 전략에 큰 차이를 나타낸다. 특히, 사람의 경우 상대 보행자로서 매우 빈번하게 마주치게 되며, 서로와의 충돌을 피하기 위한 동작을 수행하게 된다. 움직이는 장애물과 멈춰있는 장애물을 피해 걷는 것은 시각정보의 처리에서부터 차이를 나타내며, 사전에 우회하거나 단순 회피동작을 수행하기 위한 이동경로를 계획할 뿐만 아니라, 안전마진을 구축하는데 있어 최소한의 비용을 활용하기 위한 전신회전 동작을 포함하기도 한다(Basili et al., 2013; Cutting et al., 1995). 이 연구의 결과에서 보행자는 상대 보행자와의 충돌을 피하기 위해 이동경로의 수정을 통해 우회하기 보다는 전신회전 동작을 이용하여 회피하는 것을 확인하였으며, 이는 상대 보행자의 정적 · 동적 상태에 따라 차이가 있음을 나타냈다.
인간이 목표 지향적인 이동을 실시할 때, 가장 적은 처리비용(processing costs)의 운동궤도를 설정한다(Pham & Hicheur, 2009; Pham, Hicheur, Arechavaleta, Laumond, & Berthoz, 2007). 보행 시 장애물과의 충돌을 방지하기 위한 전략을 선택하기 전, 장애물의 유형과 형태, 정적 · 동적 상태에 대하여 인지한 후 장애물과 보행자 사이의 안전마진을 설정하고 이를 확보하기 위한 전략을 수행한다. 이때 인간은 최소한의 비용으로 충돌을 방지할 수 있는 보행경로를 설정하고 추가적으로 인체분절을 이용한 회피동작을 수행하는데(Basili et al., 2013), 이는 크게 두 가지로 분류할 수 있다. 보행자가 충돌에 대비하여 장애물을 우회(Figure 1B 참고)하는 전략을 선택할 경우, 먼저 몸통 분절을 장애물의 반대 방향으로 회전시킨 후 나머지 분절을 재배열시켜 보행경로 및 각 분절 질량중심의 이동방향을 수정하기 위한 움직임이 발생한다(Vallis & McFadyen, 2003). 하지만 장애물을 회피(Figure 1A 참고)하는 전략을 선택할 경우, 인체분절을 이용한 회피동작을 통해 보행경로의 수정을 최소화하기 위한 움직임을 나타낸다. 본 연구에서는 보행자가 상대 보행자를 회피하기 위한 전략으로 보행경로를 유지하면서 몸통, 골반, 발 분절을 약 30~60° 정도 회전시켜 충돌을 방지하기 위한 약 10 cm 내외의 안전마진을 만들어 내는 것으로 나타났다. 또한 회피전략 수행 시 나타난 모든 분절의 회전 방향은 장애물 방향으로, 우회전략 수행 시 회전 방향과 반대 방향으로 회전하는 것으로 나타났다. 이는 보행 방향 및 보행경로를 바꾸기 위해 선행되는 분절의 회전이 아닌, 인체 부위 중에서 상대 보행자와 충돌이 일어나는 특정 부위의 안전마진을 확보하기 위한 회피동작으로 이해할 수 있다. 특히 양팔을 포함하여 비교적 좌 · 우 질량분포가 큰 몸통분절의 경우, 충돌의 여지가 비교적 크기 때문에 충돌 부위를 안전마진 안으로 이동시키기 위해 상대적으로 더 큰 회전이 요구되는 것으로 생각된다. 이렇게 보행자가 우회가 아닌 회피전략을 사용한 것은 상대 보행자가 사물이 아닌 상호작용의 대상으로 인지하여 충돌방지를 위한 안전마진을 비교적 좁게 설정한 결과로 해석된다. 하지만 상대 보행자가 움직일 때와 멈춰있을 때 모두 같은 전략을 사용했음에도 불구하고, 몸통, 골반, 발 분절의 질량중심 좌 · 우 궤도는 유의한 차이를 나타내지 않은 반면, 좌 · 우 회피 변위와 수직축의 회전 각도에는 차이를 나타냈다.
보행 시 장애물과의 충돌을 방지하는 과정은 3단계를 걸쳐 나타난다. 먼저 장애물에 대한 정보를 인지하고, 예측된 이동경로에 대한 적응(Anticipatory Locomotor Adaptations [ALAs]) 후, 충돌을 방지하기 위한 동작을 수행한다(Basili et al., 2013; Cutting et al., 1995; Gérin-Lajoie et al., 2005). 멈춰있는 장애물이나 움직이는 장애물과의 충돌을 방지하는데 있어, 장애물을 인지하는 단계와 예측 이동경로에 적응하는 단계에서는 움직이는 장애물을 직면하였을 때 지속적인 위치파악과 이동경로의 수정을 위해 더 많은 비용이 요구된다고 보고된 반면(Basili et al., 2013; Cutting et al., 1995), 본 연구결과에서는 멈춰있는 장애물을 직면하였을 때 더 높은 수준의 회피동작을 나타냈다. 움직이는 장애물에 비해 멈춰있는 장애물을 피해 이동할 때 몸통과 골반, 발 분절의 좌 · 우 질량중심 이동에 유의한 차이가 없는 반면, 수직축 회전각도는 유의하게 크게 나타났으며, 몸통과 골반의 좌 · 우 회피 변위도 유의하게 증가되는 것으로 관찰됐다. 이러한 차이는 장애물의 형태나 장애물과의 거리 등과 같은 시각적 정보에 의존한 장애물 충돌방지 전략이 아닌, 장애물을 어떠한 사회적 대상으로 정의하는지에 따라 달라지게 된다. 예를 들어 기둥이나 마네킹과 같은 인간이 아닌 사물과의 충돌을 피할 때 보다, 인간이 장애물일 경우에 보다 더 빠른 보행속도와 짧은 안전마진을 형성하여 보다 덜 주의 깊은 회피전략을 구사한다. 이는 극복해야 하는 장애물이 인간인 경우 사회적 상호작용의 대상으로 인식되어, 두 보행자가 교차할 때 필요한 여유간격을 보행자의 일방적인 거리가 아닌 상대 보행자와 협동적으로 정의된 상호거리로 추정하여 이에 의존하기 때문이다(Iachini, Coello, Frassinetti, & Ruggiero, 2014; Silva, Aravind, Sangani, & Lamontagne, 2018). 즉, 보행 중 사물과의 충돌을 방지하기 위해서는 회피의 의무가 모두 보행자에게 주어지는 반면, 보행자와 상대 보행자 사이에서 회피의 의무는 두 사람에게 동일하게 주어지게 된다. 따라서 보행자는 상대 보행자에게 충돌을 방지하기 위한 회피동작 수행을 기대하게 되고, 이에 따라 보행자 단독의 안전마진이 아닌 보행자와 상대 보행자가 협동적으로 안전마진을 만들어 충돌을 방지하는 것이다. 하지만 현대사회에서 보행자는 수많은 상대 보행자와 마주하게 되고, 상대 보행자는 여러 가지 유형으로 나타난다. 예를 들어, 보행자가 상대 보행자를 장애물로 인식한 시점에서 상대 보행자 역시 보행자를 장애물로 인식하고 충돌을 방지하기 위한 대비를 하는 반면, 인식하지 못하고 어떠한 대비도 하지 않을 수 있다. 또한 인식을 했음에도 불구하고 회피의 의무를 보행자에게 모두 전가할지도 모른다. 본 연구의 실험과정에서 상대 보행자는 보행자와 동시에 보행을 시작하여 어떠한 회피동작도 취하지 않은 상태를 유지하면서 멈춰서거나, 목표지점까지 걸어가면서 회피의 의무를 모두 보행자에게 전가하였다. 따라서 보행자는 상대 보행자를 사회적 상호작용의 대상으로 인식하고, 협동적 안전마진을 기대하면 걷게된다(Iachini et al., 2014; Silva et al., 2018). 이때 상대 보행자가 멈추지 않고 목표지점까지 걸어갈 경우, 보행자는 지속적으로 상대 보행자를 추적하여 협동적인 안전마진을 계산하여 회피동작을 수행하는 반면, 상대 보행자가 멈춰선 시점에서 협동적 관계가 아닌 보행자에게 일방적으로 회피의 의무가 주어졌음을 인식하게 된다. 따라서 보행자는 멈춰선 상대 보행자를 사물과 같이 충돌에 대한 상호작용이 없는 것으로 인식하게 되고, 충돌을 방지하기 위해 더 넓은 회피간격을 확보하려는 시도를 하는 것으로 생각된다.
본 연구에서는 일반적인 보행로에서 두 보행자가 반대 방향으로 걸어오는 상황을 고려하여 실험을 진행하였으나, 현실에서는 보행자와 상대 보행자가 다양한 각도에서 마주하게 되고, 상대 보행자의 접근각도에 따라 보행자의 인지패턴 및 인지수준이 달라지기 때문에, 회피전략도 다양하게 나타난다(Basili et al., 2013). 또한 노인과 같이 신체기능 이외에 인지능력의 저하로 인해 과제수행능력이 떨어지는 경우도 매우 빈번하게 나타나게 된다. 따라서 추후 연구에서는 상대 보행자의 접근각도와 이동상태에 따른 보행자의 회피전략에 대한 분석과 연령에 따라 인지수준의 차이로 인해 나타나는 회피전략의 차이를 확인할 수 있는 연구가 진행되어야 할 것이다.
본 연구에서는 상대 보행자가 정적 또는 동적 장애물로 나타날 경우 충돌을 피하기 위한 보행자의 회피전략에 대한 운동학적 비교분석을 실시하였다. 이를 위해 건강한 성인 10명이 실험에 참여하였으며, 10 m의 보행로에서 적외선카메라를 이용하여 운동학적 분석을 실시하였다. 몸통, 골반, 발의 좌 · 우 질량중심 궤도에서는 유의한 차이를 보이지 않은 반면, 좌 · 우 회피 변위는 몸통과 골반에서 상대 보행자가 멈춰있을 때 더 크게 나타났다. 또한 수직축의 회전각도는 세 분절 모두 상대 보행자가 멈춰있을 때 더 증가하는 것으로 나타났다. 이 연구결과에 따라 상대 보행자가 지속해서 움직일 경우 보행자는 상대 보행자를 사회적 상호작용의 대상으로 인식하여 협동적 상호거리를 기대하면서 회피전략을 수행하는 반면, 멈춰있을 경우에는 보행자에게 회피의 의무가 주어진다고 판단하여 비교적 안전한 회피전략을 수행한다.
References
1. Alcock, L., Galna, B., Hausdorff, J. M., Lord, S. & Rochester, L. (2018). Gait & Posture Special Issue: Gait adaptations in response to obstacle type in fallers with Parkinson's disease. Gait & Posture, 61, 368-374.
Crossref
Google Scholar
PubMed
2. Aravind, G. & Lamontagne, A. (2014). Perceptual and locomotor factors affect obstacle avoidance in persons with visuospa- tial neglect. Journal of Neuroengineering and Rehabilitation, 11(1), 38.
Crossref
Google Scholar
3. Barbieri, F. A., Polastri, P. F., Gobbi, L. T. B., Simieli, L., Pereira, V. I. A., Baptista, A. M., ... & Rodrigues, S. T. (2018). Obstacle circumvention and eye coordination during walking to least and most affected side in people with Parkinson's disease. Behavioural Brain Research, 346, 105-114.
Crossref
Google Scholar
4. Basili, P., Sağlam, M., Kruse, T., Huber, M., Kirsch, A. & Glasauer, S. (2013). Strategies of locomotor collision avoidance. Gait & Posture, 37(3), 385-390.
Crossref
Google Scholar
PubMed
5. Cinelli, M. E., Patla, A. E. & Allard, F. (2008). Strategies used to walk through a moving aperture. Gait & Posture, 27(4), 595 -602.
Crossref
Google Scholar
PubMed
6. Choi, P. H. & Yoon, S. H. (2010). The kinetic and kinematic effect of a 12-week aquatic exercise program on obstacle gait in older women. Korean Journal of Sports Biomechanics, 20(2), 129-137.
Crossref
Google Scholar
7. Cole, G. K., Nigg, B. M., Ronsky, J. L. & Yeadon, M. R. (1993). Application of the joint coordinate system to three-dimensional joint attitude and movement representation: a standardization proposal. Journal of Biomechanical Engineering, 115(4A), 344-349.
Crossref
Google Scholar
8. Cutting, J. E., Vishton, P. M. & Braren, P. A. (1995). How we avoid collisions with stationary and moving objects. Psychological Review, 102(4), 627.
Crossref
Google Scholar
9. Fajen, B. R. (2013). Guiding locomotion in complex, dynamic environments. Frontiers in Behavioral Neuroscience, 7, 85.
Crossref
Google Scholar
10. Gérin-Lajoie, M., Richards, C. L., Fung, J. & McFadyen, B. J. (2008). Characteristics of personal space during obstacle circumvention in physical and virtual environments. Gait & Posture, 27(2), 239-247.
Crossref
Google Scholar
11. Gérin-Lajoie, M., Richards, C. L. & McFadyen, B. J. (2005). The negotiation of stationary and moving obstructions during walking: anticipatory locomotor adaptations and preservation of personal space. Motor Control, 9(3), 242-269.
Crossref
Google Scholar
12. Gérin-Lajoie, M., Richards, C. L. & McFadyen, B. J. (2006). The circumvention of obstacles during walking in different environmental contexts: a comparison between older and younger adults. Gait & Posture, 24(3), 364-369.
Crossref
Google Scholar
13. Gibson, J. J. (1979). The ecological approach to visual perception. Boston, MA: Houghton Mifflin.
Crossref
PubMed
14. Hackney, A. L., Cinelli, M. E. & Frank, J. S. (2015). Does the passability of apertures change when walking through human versus pole obstacles?. Acta Psychologica, 162, 62-68.
Crossref
Google Scholar
15. Hackney, A. L., Van Ruymbeke, N., Bryden, P. J. & Cinelli, M. E. (2014). Direction of single obstacle circumvention in middle-aged children. Gait & Posture, 40(1), 113-117.
Crossref
Google Scholar
PubMed
16. Iachini, T., Coello, Y., Frassinetti, F. & Ruggiero, G. (2014). Body space in social interactions: a comparison of reaching and comfort distance in immersive virtual reality. PloS One, 9(11), e111511.
Crossref
Google Scholar
17. Kim, S. B. & Yu, Y. J. (2009). The Characteristics of obstacle gaits in female elders after 12 weeks of an aquatic program. Korean Journal of Sports Biomechanics, 19(3), 539-547.
Crossref
Google Scholar
18. Lynch, S. D., Kulpa, R., Meerhoff, L. A., Pettre, J., Cretual, A. & Olivier, A. H. (2017). Collision avoidance behavior between walkers: global and local motion cues. IEEE transactions on visualization and computer graphics.
Crossref
Google Scholar
19. Olivier, A. H., Marin, A., Crétual, A., Berthoz, A. & Pettré, J. (2013). Collision avoidance between two walkers: Role-dependent strategies. Gait & Posture, 38(4), 751-756.
Crossref
Google Scholar
20. Patla, A. E., Adkin, A., Martin, C., Holden, R. & Prentice, S. (1996). Characteristics of voluntary visual sampling of the environment for safe locomotion over different terrains. Experimental Brain Research, 112(3), 513-522.
Crossref
Google Scholar
21. Patla, A. E., Prentice, S. D., Robinson, C. & Neufeld, J. (1991). Visual control of locomotion: strategies for changing direction and going over obstacles. Journal of Experimental Psychology: Human Perception and Performance, 17(3), 604 -634.
Crossref
Google Scholar
22. Patla, A. E. & Shumway-Cook, A. (1999). Dimensions of mobility: defining the complexity and difficulty associated with community mobility. Journal of Aging and Physical Activity, 7(1), 7-19.
Crossref
Google Scholar
23. Pham, Q. C. & Hicheur, H. (2009). On the open-loop and feedback processes that underlie the formation of trajectories during visual and nonvisual locomotion in humans. Journal of Neurophysiology, 102(5), 2800-2815.
Crossref
Google Scholar
24. Pham, Q. C., Hicheur, H., Arechavaleta, G., Laumond, J. P. & Berthoz, A. (2007). The formation of trajectories during goal‐oriented locomotion in humans. II. A maximum smoothness model. European Journal of Neuroscience, 26(8), 2391-2403.
Crossref
Google Scholar
25. Silva, W. S., Aravind, G., Sangani, S. & Lamontagne, A. (2018). Healthy young adults implement distinctive avoidance strategies while walking and circumventing virtual human vs. non-human obstacles in a virtual environment. Gait & Posture, 61, 294-300.
Crossref
Google Scholar
26. Simieli, L., Vitório, R., Rodrigues, S. T., Zago, P. F. P., Pereira, V. A. I., Baptista, A. M., ... & Barbieri, F. A. (2017). Gaze and motor behavior of people with PD during obstacle circumvention. Gait & Posture, 58, 504-509.
Crossref
27. Vallis, L. A. & McFadyen, B. J. (2003). Locomotor adjustments for circumvention of an obstacle in the travel path. Experimental Brain Research, 152(3), 409-414.
Crossref
Google Scholar
28. Yoon, S., Chang, J. K. & Kim, J. (2014). Effects of a water exercise on the lower extremities coordination during obstacle gait in the female elderly-focusing on training and detraining effects. Korean Journal of Sport Biomechanics, 24(2), 95-101.
Crossref
Google Scholar
