Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Ji-Yong Joo
Young-Kwan Kim
http://dx.doi.org/10.5103/KJSB.2018.28.4.237 Epub 2019 January 17
Abstract
Objective: Flat-footed people struggle with excessive ankle joint motion during walking and running. This study aimed to investigate the effects of customized three-dimensional 3D-printed insoles on the kinematics of flat-footed people during daily activities (walking and running).
Method: Fifteen subjects (height, 169.20 ± 2.61 cm; age, 22.87 ± 8.48 years; navicular bone height, 13.2 ± 1.00 mm) diagnosed with flat feet in a physical examination participated in this study.
Results: The customized 3D-printed insoles did not significantly affect 3D ankle joint angles under walking and running conditions. However, they shifted the trajectory of the center of pressure (COP) laterally during fast walking, which enhanced the load distribution on the foot during the stance phase.
Conclusion: The customized 3D-printed insoles somewhat positively affected the pressure distribution of flat-footed people by changing the COP trajectory. Further research including comparisons with customized commercial insoles is needed.
Keywords
Gait is one of the most basic human motions (Chun & Shin, 2011; Joo, Kim, & Park, 2015; Kim & Cho, 2013), and the eversion that occurs after landing absorbs and disperses the ground impact force. Flat foot, a congenital or acquired disease, occurs in 10-20% of the total population (Magee, 2008; Dunn et al., 2004). Flat-footed walking consists of medial talar rotation, decreased medial arch height, forefoot supination, and post-landing abduction (Arangio, Reinert, & Salathe, 2004; Kitaoka, Luo, & An, 1998). Excessive ankle movements, especially in flat-footed walking, can reduce shock absorption, resulting in fatigue fractures of the forefoot, deformed feet, and degenerative arthritis of the knee (Clarke, Frederick, & Cooper, 1983; Kim, Moon, Kim, & Park, 1998; Kim, 2008; Lee, 2004).
A variety of insole designs developed to date have been used to correct flat-footed walking or as conservative therapies. Insole use reduces chronic pain and helps align the musculoskeletal system to prevent foot deformity (Kim, Ryu, & Kim, 2012). However, the personalized insoles currently in the market cost 200,000-300,000 Won, which is cost prohibitive for many consumers. Due to high production costs, previous studies of customized insole used minimal numbers of subjects and could not test various customized insoles under various conditions (Kim, 2011; Kim et al., 2012; Lee, Lee, & Park, 2007; Yun, 2007).
Recently, a launch of 3D printers has enabled the production of various customized products using low-cost materials. Dombroski, Balsdon, & Froats (2014), who produced a flat customized 3D-printed insole, reported in walking studies that the 3D-printed insole improves footwall collapse. Additionally, although 3D-printed insoles showed a similar effect to that of expensive conventional customized insoles, it was difficult to generalize the study results because the study included only one subject.
Previous studies in the general population showed changes in lower limb joint angle, ground reaction force, and muscle activation when the value was increased at a comfortable gait speed (Ohmichi & Miyashita, 1983; Andriacchi, Ogle, & Falant, 1977). The increased walking speed and ground impact force caused sudden changes in joint range of motion and muscle activity (Andriacchi et al., 1977). However, most studies on flat foot-correcting insoles have been performed only at the preferred gait speed. Increasing gait speed increases the risk of injury and helps predict changes in joint kinematics. However, few reports have examined how foot kinematics change in different directions.
Therefore, this study aimed to investigate whether the recently popularized 3D printing technology can be applied to the biomechanics field to improve the quality of life of people with flat feet. Here we created a personalized 3D-printed insole for people with flat feet and investigated the differences in ankle kinematics and center of pressure (COP) trajectory between the manufactured insole under walking and running conditions and the insole mounted in ready-made sneakers.
1. Participants
The study subjects were men in their 20s and 30s who voluntarily participated in response to a posted announcement. The subjects who agreed to participate were given an explanation of the experiment and provided written informed consent. The study was approved by our facility's institutional review board (IRB).
The 15 participants (height, 169.20 ± 2.61 cm; age, 22.87 ± 8.48 years; navicular bone height, 13.2 ± 1.00 mm) were diagnosed as flat-footed in normal hospital and physical examinations and reported experiencing discomfort. All subjects were familiarized with the experimental procedures and performed light stretches before the measurements were taken (within 10 min).
2. Experimental tools
The experimental and analytical equipment used in this study are as follows. Five high-speed infrared cameras (Osprey®; Motion Analysis, Santa Rosa, CA, USA) were used with the software to operate them (Cortex® ver. 4.1; Motion Analysis). The camera acquisition rate was 200 Hz, and a ground reaction machine (BP400600; AMTI, Watertown, USA) with an acquisition rate of 2,000 Hz was also used to collect the COP data during walking.
To collect the image data, twenty 19-mm reflective markers were attached to the major anatomical points of both feet and calves using double-sided tape. The subjects were wearing standardized shorts and shoes (SL-242; Maximum, Slazenger, Korea) of different sizes.
3. Experimental procedure
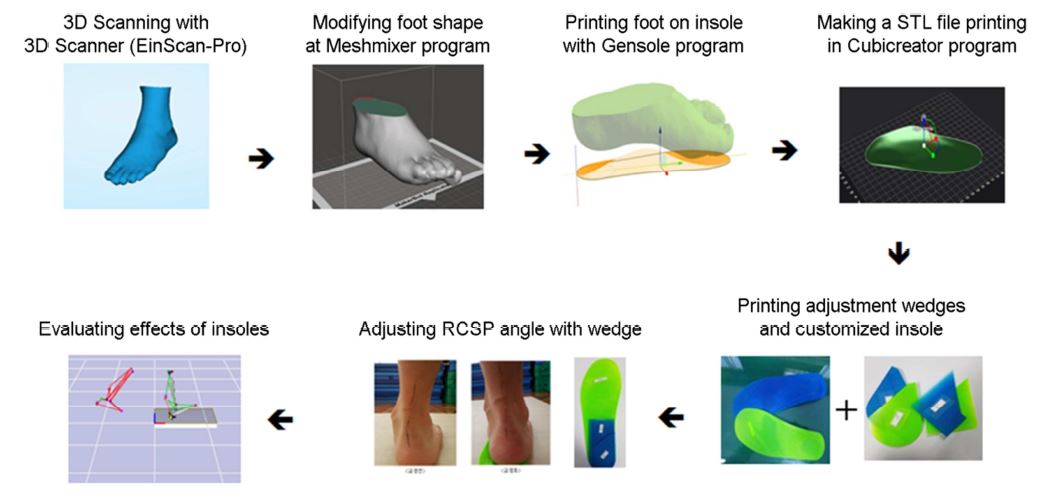
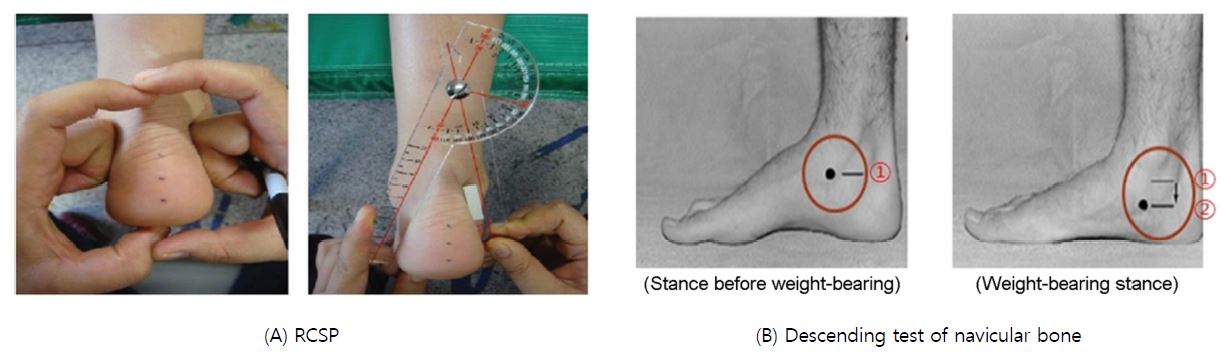
On the first day the subjects came to the laboratory, their basic body figure was measured, a descending test of the navicular bone was performed, and the foot shape was scanned to produce the customized insole for each person. The entire process from scanning to insole production is shown in (Figure 1). First, the subject's foot was scanned in three dimensions using a 3D scanner (EinScan-Pro, Hustem, Korea) and EinScan-Pro software (Hustem, Korea). Here, to prevent lowering of the raised navicular bone during ground contact, while the subject sat in the chair, the non-weight-bearing state of the foot in mid-air was scanned. In the non-weight-bearing state, the inner arch is not collapsed and the arch height is maintained to further improve shock-absorbing ability. To modify the 3D model, Meshmixer software (Autodesk, USA) and Gensole software (USA) were used. A wedge was created using Solid-Works 2014 software (Dassault Systems, USA) to adjust the medial height of the insole to the normal calcaneal angle. The 3D printing of the insole and wedge were completed via Cubicreator 3D printing software (Hyvision, Korea) and a 3D printer (Cubicon 3DP-110F; Hyvision) (Figure 1).
On the second day the subjects came to the laboratory and the experiments were performed using the manufactured insoles. The resting calcaneal stance position (RCSP) was measured and a wedge was attached to the bottom of the insole according to the severity of the flat foot to create the RCSP of a normal foot (Figure 2).
The experimental groups were divided as flat feet using the commercially available insole or the individually customized 3D-printed insole. Therefore, each group was defined as flat foot with general insoles (FG) or flat foot with customized insoles (FC). Walking speeds were measured as follows: comfortable walking (0.83-1.11 m/s), fast walking (1.11-1.38 m/s), and running (1.38-1.66 m/s). The researcher asked the subject to walk about 20% faster than the comfortable walking for fast walking and asked them to run at jogging speed for running. Fast walking and running conditions were determined in a random order, and the number of iterations was 10 for each condition. Between each experimental condition, a 5-minute rest was given to minimize fatigue-induced performance loss.
4. Data processing
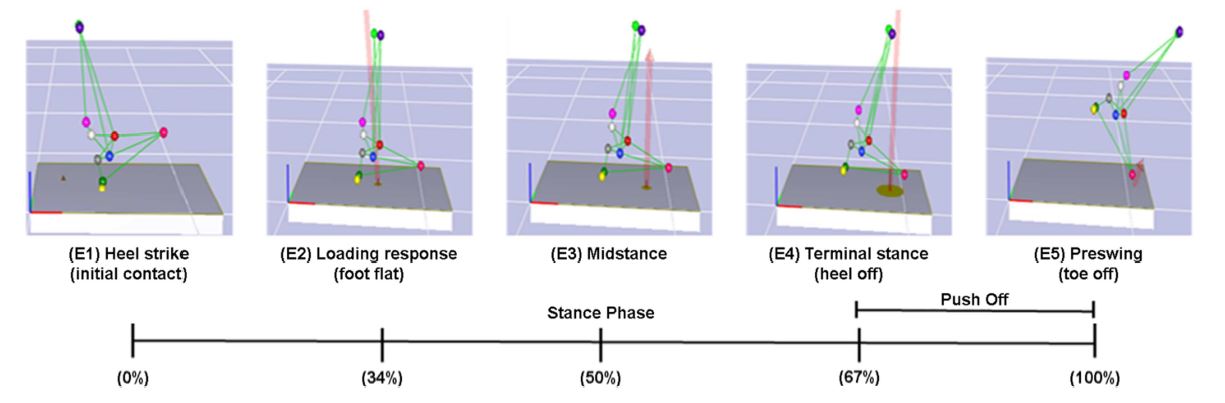
The kinematic variables were calculated using a motion analysis program (Cortex® ver. 5.3.1; Motion Analysis) and Visual 3D® software (ver. V6 Professional; C-Motion, Century Blvd, USA). The operating data were smoothed with a cutoff frequency of 8 Hz, while the ground reaction force data were smoothed with a Butterworth low-pass filter with a cut-off frequency of 25 Hz (Decker et al., 2003; Sinsurin, Vachalathiti, & Jalayondeja, 2013) to calculate the variables. The 3D coordinate axes were defined in each segment using the smoothed reflection marker position data. The following dependent variables were used for the statistical analysis. The angle of the ankle joint was calculated by the cardan angle as the directional cosine correlation between the local coordinate system of the calf and foot segments. This is the angle describing the relative motion of the foot, which is the distal segment, based on the proximal segment of the calf. According to the general rules, the first rotation is defined as flexion/extension, the second rotation is eversion/inversion, and the third rotation is internal/external rotation. To facilitate the analysis and interpretation, the standardized major time points during the entire walking cycle were marked as percentages (Figure 3).
1) Standardized time at stance at angular main point (%)
As shown in Figure 3, stance is classified into E1 when the heel strikes the ground (0%), E2 when the foot flat is in full ground contact (34%), E3 at midstance (50%), E4 when a heel is off the ground (67%) and E5 when the toe is off the ground (100%).
5. Statistical analysis
To investigate the presence of significant intergroup (FC and FG) differences, the stance was standardized at 100% time and the following statistical tests were performed at each 1% unit of time. Statistical tests were performed by SPSS 21.0 (IBM, USA) and the significance level of all tests was set at .05. First, one-way repeated-measures analysis of variance (ANOVA) was performed with a speed change to visualize changes in ankle kinematics with increased walking speed. Second, a paired-samples t-test was applied to verify the effects of FC and FG at the different walking speeds. Third, two-way repeated-measures ANOVA was performed to display the effect of interaction between walking speed changes and the 3D-printed insole on ankle movements.
The results of this study are as follows.
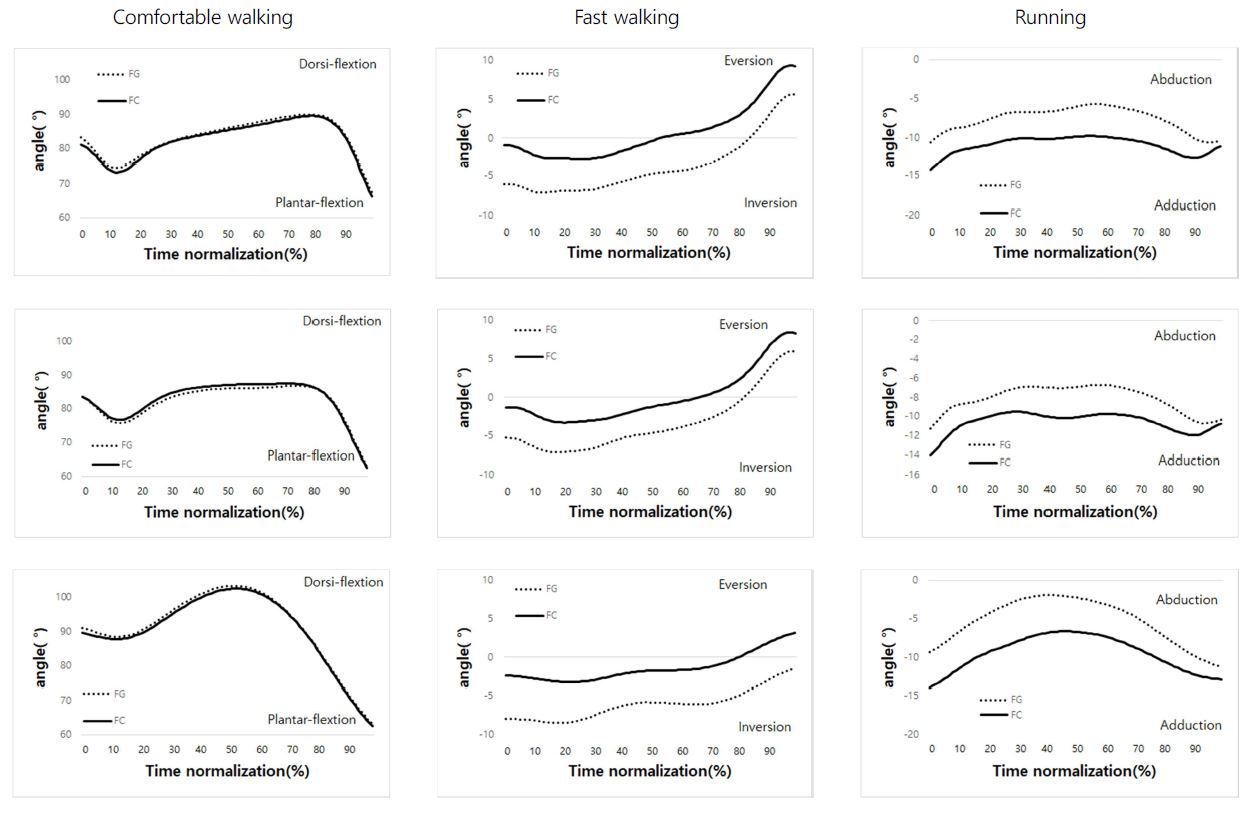
1. Ankle joint angles (dorsal flexion, plantar flexion, inversion, eversion, adduction, abduction) changed with gait speed
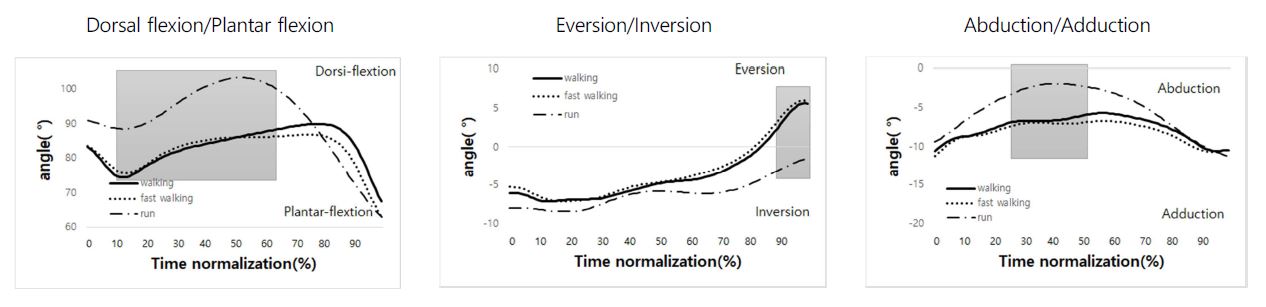
Figure 4 compares the differences in ankle joint angles depending on the change of moving speed in the standardized time (%) of the stance. The angles in ankle joint (dorsal flexion, plantar flexion, inversion, eversion, adduction, abduction) did not differ significantly between comfortable walking and fast walking but did differ significantly between walking (comfortable, fast) and running (p < .05). There was a statistically significant difference in E1 (10%) to E3 (60%) sections (weight shift section) of dorsal flexion and plantar flexion (p < .05); specifically, dorsal flexion occurred more commonly during running. There was also a statistically significant difference in E4 (90%) to E5 (100%), immediately before the toe strike, in inversion and eversion angles, and the inversion angle of running was larger than that during walking (p < .05). There was a statistically significant difference in the interval from E1 (10%) to E3 (60%) (weight shift time) in the adduction and abduction angles, and the abduction angle increased during running (p < .05).
2. Effects of customized 3D-printed insole on walking and running conditions: Angular changes (dorsal flexion, plantar flexion, inversion, eversion, adduction, abduction)
Figure 5 shows the analysis results of comparing the ankle angle differences of FG and FC at a standardized time (%). At all speed conditions, the effect of the customized 3D-printed insole on 3D ankle joint angle was statistically insignificant. However, the FC demonstrated a smaller landing angle inversion angle and take-off eversion angle than the FG.
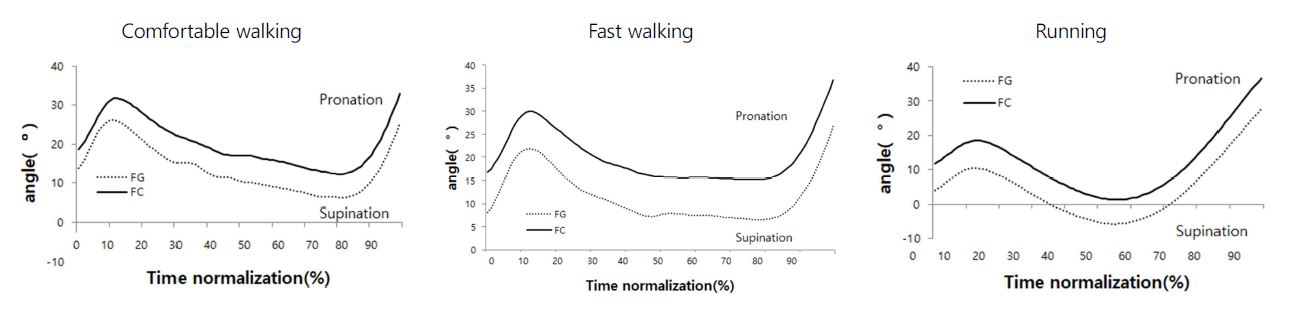
3. Effects of customized 3D-printed insole in walking and running conditions: change in Achilles tendon angle
Figure 6 compares the Achilles tendon angles of the FG and FC at standardized time (%). The FG and FC did not differ significantly at any speed condition. However, the mean pronation values for the FG were higher than those of the FC.
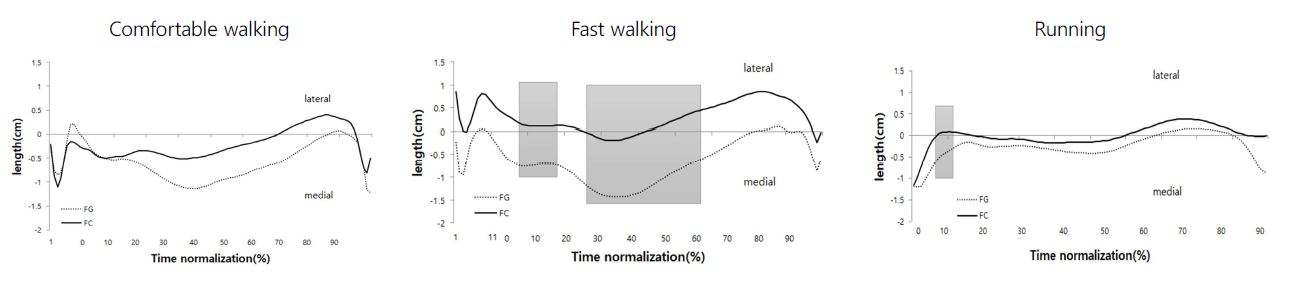
4. Effect of customized 3D-printed insole on walking and running conditions: change in center of pressure trajectory
Figure 7 compares the COP displacements of FG and FC at standardized time (%). No difference was seen between the FG and the FC in the comfortable walking condition. There was a statistically significant difference between E1 and E2 (7-23%) and E2 and E3 (30-56%) (p < .05) in the fast walking condition. The trajectory of the FG was significantly more lateral than that of the FC in the fast walking condition. A statistically significant difference between the FG and FC was seen during E1-E2 (10-13%) (p < .05).
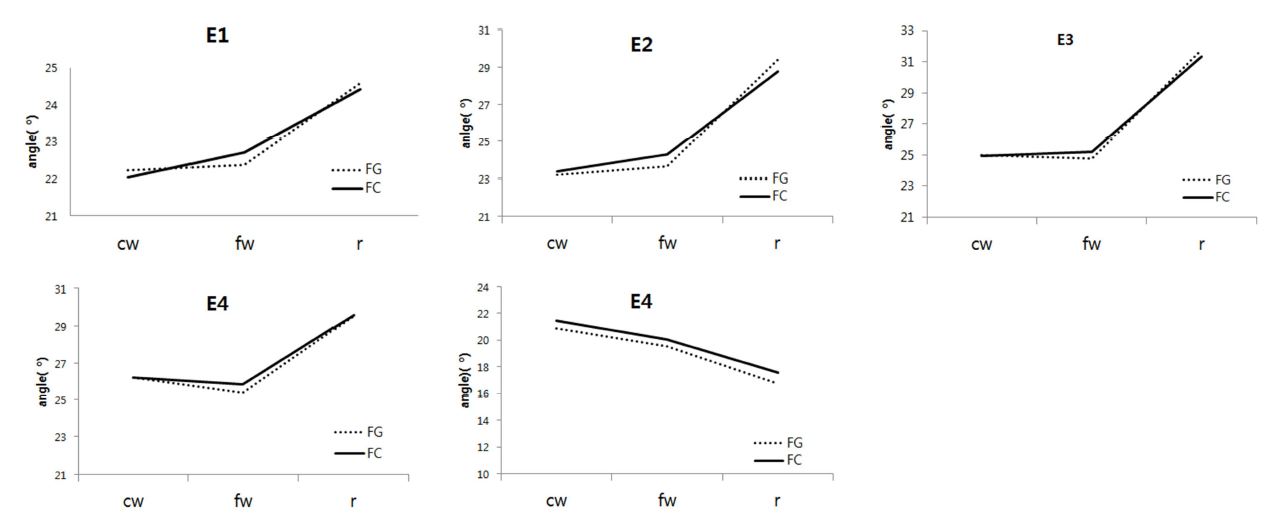
5. Effects of walking speed changes and customized 3D-printed insoles: inversion angle of each ankle by event
Figure 8 no significant interaction effect of walking speed change and the customized 3D-printed insole was seen in any event.
During walking, the medial foot arch of flat feet becomes lower than that of normal feet. If this occurs repeatedly, the load on the foot becomes excessive and excessive eversion occurs in the subtalar joint, increasing the risk of foot fatigue (Diris, Knuttgen, & Tittel, 1988; Pinney & Lin, 2006). This study aimed to develop a personalized insole using a 3D scanner and printer to aid the gait pattern of persons with flat feet and investigate the effect of a customized insole on the kinematics of flat feet in walking and running conditions.
The analysis of the effect of the walking speed revealed no difference in the 3D ankle joint angles between the comfortable and fast walking conditions, which was observed only in some of the stance sections when the speed was increased to running. A significant change in joint angle with increasing speed was thought to strain ankle motion. The increases in range of motion and maximum angles of the ankle joint (dorsal flexion, plantar flexion, inversion, eversion, adduction, and abduction) were similar to those reported by Choi (2008).
The effects of wearing a customized 3D-printed insole (FC) was not significantly different from those of the ready-made insole (FG) regardless of walking speed; specifically, there was no statistically significant difference in the inversion or eversion angle. However, the FG featured a longer time to eversion due to the easily collapsed foot arch (between E4 and E5), which is also a potential cause of fatigue accumulation in the ankle. In another study (Kim, 2011; Song, 2008) that examined the effects of insoles, there was no mention of eversion time and the incidence of eversion was reduced by insole use. Therefore, that finding supported only a portion of this study's findings. There was no statistically significant difference between the FC and FG in adduction and abduction angles regardless of swelling condition. However, the customized 3D-printed insole reduced the risk of external ligament injuries by reducing the adduction and abduction angles. At the running speed with a short ground contact time, the FG showed a severe adduction angle after landing. Lim (2015) explained that after the landing, the large internal angle was not absorbed well due to weakening of the soleus muscle.
If the angle of the Achilles tendon changes significantly after landing, the knee movement on the horizontal plane may increase, resulting in a knee injury (Mann, 1993). The study results showed that the Achilles tendon angle was not affected by insole use or changes in walking speed. The FG and FC showed similar angles of 11° for walking, 12° for fast walking, and 6° for running. These findings are similar to those reported by Song (2008), who claimed that wearing a customized insole does not affect the Achilles tendon angle.
COP changes during gait indicate mobility and stability. Observing the movement path of the foot's COP during the stance phase of gait can reveal the subject’s balance or gait pattern. It can be used to analyze whether the heel strike and the toe push are performed properly, which has biomechanical significance (Kim & Park, 2005; Park, Nam, & Back, 2005; Back & Lim, 1997; Kiriyama et al., 2004). In normal gait, the COP moves from the lateral to medial side of the foot. Excessive medial and lateral movements during exercise will affect medial and lateral COP equilibrium, thereby increasing muscle and joint fatigue and leading to injury (Park, 2006). In this experiment, the COP of FG tended to move severely inward during walking. However, FC moved the COP outward beyond that of the FG. In particular, there was a statistically significant difference in the E1-E2 interval (7-23%; landing time) and E2-E3 interval (30-56%; time the center moves after landing). There was a statistically significant difference only in the initial landing E1-E2 interval (10-13%; landing time). The effect of customized 3D-printed insoles was seen at the beginning of the landing, but there was no significant effect toward the end. This is because the effect of a large impact on the insole is so severe that its correction effect is reduced. Therefore, it is necessary to increase the filling rate of the insole's filament in the future. Lee et al. (2007) reported that the use of a custom-built insole for a flat-footed person would not result in excessive eversion if the COP moved laterally, thus securing ankle stability and reducing soft-tissue fatigue. In addition, in the knee, the load is corrected to not be deflected inward and outward, thereby reducing joint and muscle burden as well as the risk of arthritis or injury (Winter, 1995).
This study has some limitations. Since the elastic properties of the insole change depending on the filament filling rate of the insole, it is necessary to test various filling rates to create an optimized insole under various stitching conditions. Comprehensive follow-up studies including durability are also necessary.
In this study, we developed a customized insole using 3D printing technology for flat feet and investigated its effects in walking and running conditions on ankle kinematics and COP trajectory. Experiments performed in walking, fast walking, and running conditions showed no significant effect of the customized 3D-printed insole on 3D ankle joint angles. However, the 3D-printed customized insole allowed the COP trajectory to move outward in some areas of fast walking and running, thereby improving the pressure exerted only on the inside. In conclusion, the customized 3D-printed insole may positively affect the footprint of the flat foot by changing the COP trajectory.
References
1. Andriacchi, T. P., Ogle, J. A. & Falant, J. O. (1977). Walking speed as a basis for normal and abnormal gait measurements. Journal of Biomechanics, 10, 261-268.
Crossref
Google Scholar
PubMed
2. Arangio, G. A., Reinert, K. L. & Salathe, E. P. (2004). A biomechanical model of the effect of subtalar arthroereisis on the adult flexible flat foot. Clinical Biomechanics, 19(8), 847-852.
Crossref
Google Scholar
3. Back, N. J. & Lim, M. S. (1997). The path of center of pressure (COP) of the foot during walking. Journal of Korean Academy of Rehabilitation Medicine, 21(4), 762-771.
Crossref
Google Scholar
4. Choi, Y. E. (2008). The EMG analysis on leg muscle's activity in accordance with change of gait velocity and direction. University of Konkuk, Seoul.
Crossref
5. Chun, Y. J. & Shin, I. S. (2011). Comparison of Gait Pattern during the Support Phase after Perturbation According to Age. Korean Journal of Sport Biomechanics, 21(3), 281-288.
Crossref
Google Scholar
6. Clarke, T. E., Frederick, E. C. & Cooper, L. B. (1983). Biomechanical measurement of running shoe cushioning properties. Biomechanical Aspects of Sport Shoes and Playing Surfaces, 25-33.
Crossref
Google Scholar
7. Decker, M. J., Torry, M. R., Wyland, D. J., Sterett, W. I. & Steadman, J. (2003). Gender differences in lower extremity kinematic, kinetics, and energy absorption during landing. Clinical Biomechanics, 18, 662 -669
Crossref
Google Scholar
8. Diris, A., Knuttgen, J. G. & Tittel, K. T. (1988). Olympic book of sports medicine. Oxford, England, Blackwell.
Crossref
9. Dombroski, C. E., Balsdon, M. E. & Froats, A. (2014). The use of a low cost 3D scanning and printing tool in the manufacture of custom-made foot orthoses: a preliminary study. BMC Research Notes, 7(1), 443.
Crossref
Google Scholar
PubMed
10. Dunn, J. E., Link, C. L., Felson, D. T., Crincoli, M. G., Keysor, J. J. & McKinlay, J. B. (2004). Prevalence of foot and ankle conditions in a multiethnic community sample of older adults. American Journal of Epidemiology, 159(5), 491-498.
Crossref
Google Scholar
11. Joo, J. Y., Kim, Y. K. & Park, J. Y. (2015). Reliability of 3D-inertia measurement unit based shoes in gait analysis. Korean Journal of Sport Biomechanics, 25(1), 123-130.
Crossref
Google Scholar
12. Kim, K. H. (2011). Biomechanical analysis of arch supprot devices on normal and low arch. University of Kyung, Busan Metropolitan City.
Crossref
13. Kim, M. Y., Moon, J. H., Kim, H. J. & Park, J. S. (1998). The changes of foot pressure distribution after orthotic shoes wearing in flatfoot. Annals of Rehabilitation Medicine, 22(1), 217-223.
Crossref
Google Scholar
14. Kim, R. B. & Cho, J. H. (2013). An analysis on the contribution of lower limb joint according to the gender and gait velocity. Korean Journal of Sport Biomechanics, 23(2), 159-167.
Crossref
Google Scholar
15. Kim, S. G., Ryu, Y. Y. & Kim, H. D. (2012). Research Article: The effects of Insole supporting medial longitudinal arch while walking in spastic cerebral palsy with pes planus. Journal of the Korean Society of Physical Medicine, 7(4), 471-480.
Crossref
Google Scholar
16. Kim, S. J. (2008). Correlation between navicular drop and first metatarsophalangeal joint dorsiflexion. University of Kyonggi, Suwon.
Crossref
17. Kim, J. T. & Park, S. H. (2005). The displacement of center of pressure during adult female gait based on the body mass. Gyeongnam Physical Education Research, 10(1), 59-65.
Crossref
18. Kiriyama, K., Warabi, T., Kato, M., Yoshida, T. & Kobayashi, N. (2004). Progression of human body sway during successive walking studied by recording sole-floor reaction forces. Neuroscience Letters, 359(1-2), 130-132.
Crossref
Google Scholar
19. Kitaoka, H. B., Luo, Z. P. & An, K. N. (1998). Three-dimensional analysis of flatfoot deformity: cadaver study. Foot & Ankle International, 19(7), 447-451.
Crossref
Google Scholar
20. Lim, G. Y. (2015). A biomechanical analysis of flatfoot with different running speed. University of Korea National Sport, Seoul.
Crossref
21. Lee, J. H., Lee, Y. S., Lee, J. Y. & Park, S. H. (2007). Biomechanical gait analysis and simulation on the normal, cavus and flat foot with orthotics. The Korean Society of Mechanical Engineers, 31(11), 1115 -1123.
Crossref
Google Scholar
22. Lee, Y. C. (2004). Foot and ankle, Seoul: Kyohak.
Crossref
23. Mann, R. A. (1993). PesCavus, sixth ed., In: Mann, R. A., Coughlin, M. J. (Eds.), Surgery of the Foot and Ankle, 1, 785-801.
Crossref
24. Magee, D. J. (2008). Orthopedic physical assessment. Philadelphia: W.B. Saunders.
Crossref
Google Scholar
25. Ohmichi, H. & Miyashita, M. (1983). Relationship between step length and selected parameters in human gait. Biomechanics, VIII, 480 -484.
Crossref
26. Park, J. W., Nam, K. S. & Back, M. Y. (2005). The relationship between the plantar center of pressure displacement and dynamic balance measures in hemiplegic gait. Physical Therapy Korea, 12(1), 11-21.
Crossref
Google Scholar
27. Park, K. R. (2006). The effect of wearing rear-balance shoes on standing posture and gait mechanics. University of Inje, Gimhea.
Crossref
28. Pinney, S. J. & Lin, S. S. (2006). Current concept review: acquired adult flatfoot deformity. Foot & Ankle International, 27(1), 66-75.
Crossref
Google Scholar
29. Sinsurin, K., Vachalathiti, R., Jalayondeja, W. & Limroongreungrat, W. (2013). Different sagittal angles and moments of lower extremity joints during single-leg jump landing among various directions in basketball and volleyball athletes. Journal of Physical Therapy Science, 25(9), 1109-1113
Crossref
Google Scholar
30. Song, J. H. (2008). The kinematic comparative study about effects of foot orthotics. Korean Journal of Sport Science, 19(3), 11-21.
Crossref
31. Yun, J. M. (2007). The study of the Q-anlge changes with BFO (Biomechanical Foot Orthoses) in overpronators. University of Kyonggi, Suwon.
Crossref
32. Winter, D. A. (1995). ABC (anatomy, biomechanics and control) of balance during standing and walking. Waterloo Biomechanics.
Crossref
